V
主页
Snake-SLAM:使用解耦非线性优化的高效全局视觉惯性 SLAM
发布人
@橙子的RGB空间 大佬测试了SnakeSLAM代码。Snake-SLAM 是一种可在低功率航空设备上稳定运行的VI SLAM 自主导航系统,可用于手机端、头戴AR设备等。跟踪前端具有地图复用、闭环、重定位功能,并支持单目、立体和 RGBD 输入。该系统通过图论算法来减少关键帧并提出一种“延时地图”的方法来确保生成准确的全局地图,优化后端将 IMU 状态估计与从视觉光束法平差中进行解耦,将有约束的优化问题拆分为两个子问题,大大降低的计算复杂度,并使得Snake-SLAM 相比于现有的SLAM系统可以使用更大滑窗 。
打开封面
下载高清视频
观看高清视频
视频下载器
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
四旋翼模型与控制基础
基于单张图片的3D人脸重建概述
LVI-SAM|视觉-惯性子系统(VIS)代码精读
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
四旋翼无人机-ADRC整体介绍
Occupancy Networks后处理
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
如何轻松拿捏LIO-SAM-数学基础篇
BEV与Occupancy入门参考资料必看
Open3D与点云处理简介(公开课)
原来矿道还可以这么漂亮!
光学3D测量技术原理及应用
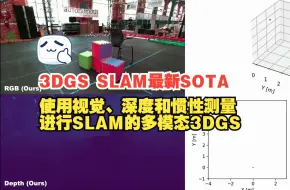
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
传感器与遥控器校准原理
ORB-SLAM3基本原理与系统架构
如何处理视觉SLAM长期定位中的外观变化和轨迹漂移?
大作业|激光-视觉-IMU-GPS融合SLAM算法
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
无相机姿态40秒重建3DGS方法
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
绪论|单目相机标定理论及张正友标定法(上篇)
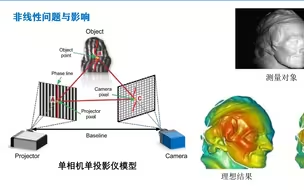
结构光的非线性问题与校正
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
国内首个面向具身智能方向的理论与实战系统课程
当3DGS遇上可泛化物体位姿估计
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
四旋翼无人机-PX4控制算法代码
绪论(LOAM系列与LIO-SAM简介)
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
LVI-SAM代码实战与评估
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
CVPR2024开源NetTrack:跟踪高动态物体!
PID控制器原理讲解
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
深度相机概述
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
高速结构光三维面形测量方法