V
主页
Towards embodied intelligence -Nicolas Heess (DeepMind)
发布人
The talk was given as part of the ICRA 2021 workshop on recent advances in MPC and RL for legged robots video link: https://www.youtube.com/watch?v=FRhmDoPw5RE
打开封面
下载高清视频
观看高清视频
视频下载器
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
How to design nonlinear MPC with deep learning prediction model
Tutorial - Crocoddyl - Nicolas Mansard
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
The legged robot whole-body State RVIZ plugin
Semantic Traversability Estimation Using Pose Projected Feature
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
人形机器人腿部结构 基于 4DoF 球面并联机构
Foothold Evaluation Criterion for Dynamic Transition Feasibility for Quadruped
Impact-Aware Bimanual Catching of Large-Momentum Objects
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
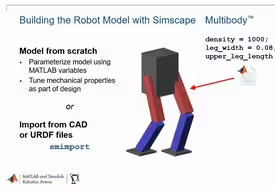
双足机器人的建模与仿真 MATLAB and Simulink
overcoming the practical challenges when using reinforcement learning
基于分层优化的四足机器人全身运动控制搬运重物
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
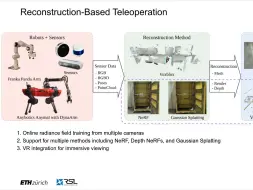
ETH | Anymal 机器人远程操作的辐射场
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
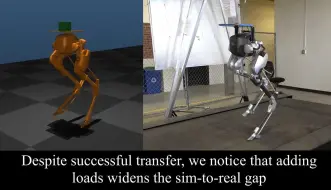
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
Reinforcement learning for blind stair climbing with legged and wheeled robot
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
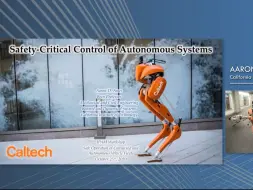
Safety-Critical Control of Autonomous Systems -Aaron Ames
Sampling based path replanning
Meet the Futuristic Military Robot Dog
Learning Morphologically Adaptive Locomotion Controllerfor Quadruped
Bipedal Locomotion Reward Learning from Demonstrations via Inverse Reinforcement
what is reinforcement learning
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
人形机器人 手指机械结构
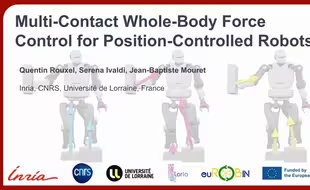
有开源github代码! RA-L论文 人形机器人的多接触全身控制
SOTA ! 浙大最新成果!四足强化学习走梅花桩!
Generalizing and improving regularized predictive control for legged robots