V
主页
南洋理工大学博士分享!规模化可学习与交互式的自动驾驶决策系统如何构建?
发布人
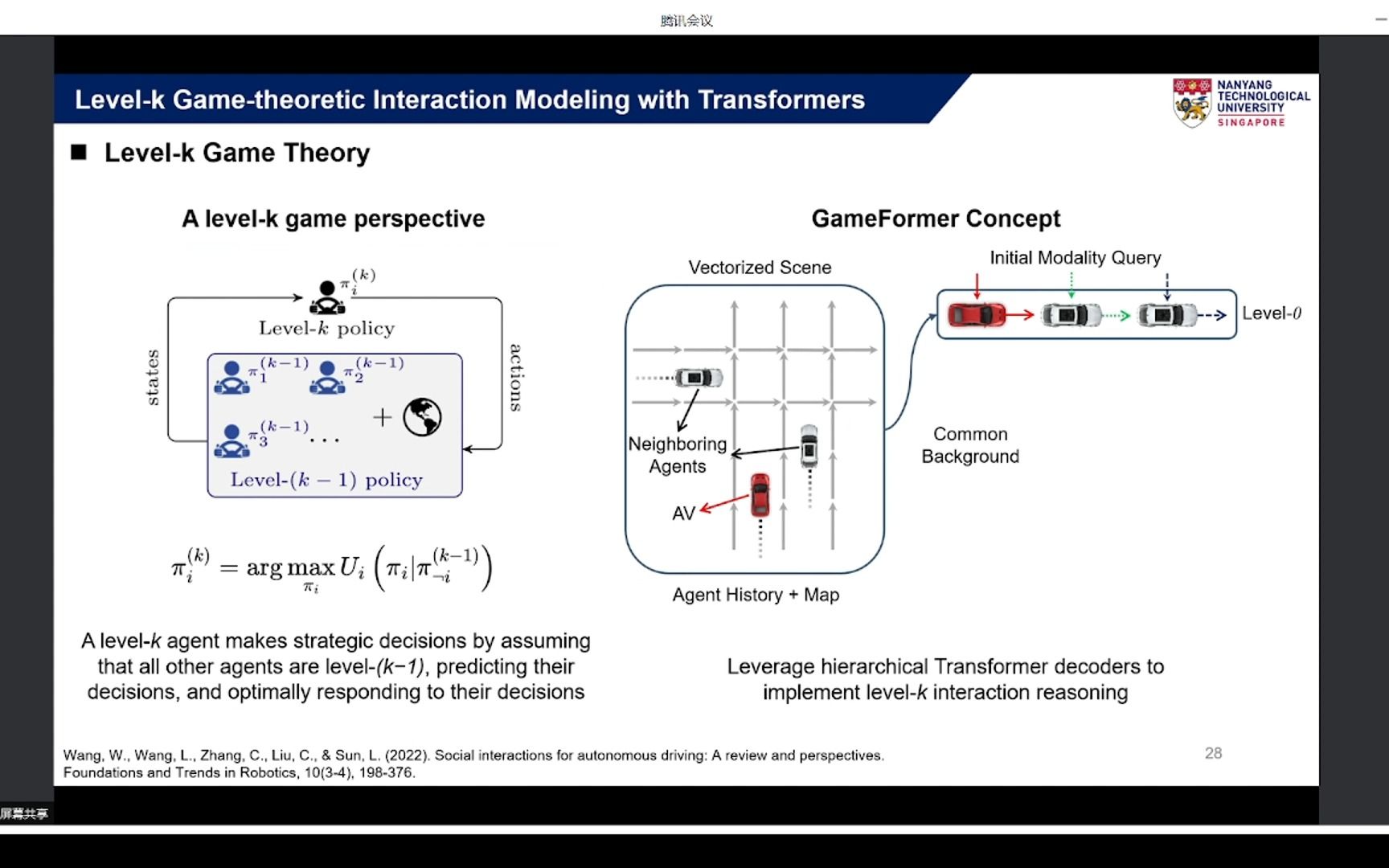
自动驾驶之心邀请来了新加坡南洋理工大学博士生—黄志宇!为大家分享规模化、可学习和交互式的自动驾驶决策 本次直播将介绍我在自动驾驶决策算法开发领域的三项最新研究。这些研究基于不同的博弈方法,旨在开发多种深度神经网络预测模型和联合预测规划模型。通过这些模型的应用,我们期望实现决策过程的可扩展性、学习能力以及强交互性。 主讲嘉宾: 黄志宇 新加坡南洋理工大学博士生 加州大学伯克利分校访问学者 个人主页:https://mczhi.github.io/ 主讲内容: 1.DIPP (可微分集成预测与规划) 2.DTPP (用于树规划的预测和代价模型) 3.GameFormer (基于Transformer的Level-k博弈交互)
打开封面
下载高清视频
观看高清视频
视频下载器
【比刷剧还爽!】太完整了吧!中国科学院大学和上海交大强联合的(PyTorch+深度学习+强化学习+机器学习)课程分享!快速入门极简单——人工智能_AI_神经网络
看看顶级大佬如何梳理L2++决策算法的演进-下
看看顶级大佬如何梳理L2++决策算法的演进-上
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
速度提高60倍!重建你的自动驾驶场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)
特斯拉的4D自动标注详解!为什么无标注数据work?
自动驾驶绕不开的仿真!LightSim:从零开始搭建一个真实、可控、可扩展的自动驾驶仿真平台
CUDA cuDNN TRT版本如何选择?基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!
什么是端到端自动驾驶?什么是基础world model?
(强推)Transformer模型最通俗易懂的讲解,零基础也能听懂!看计算机大佬如何讲解Transformer原理!(人工智能、深度学习、机器学习、图像处理)
一文尽览:自动驾驶大语言模型应用综述分享
最新!如何使用深度强化学习在未知环境中进行导航?
自动驾驶方向博士申请小白指南,看这个就够啦 !从论文准备到套磁导师!
LLM+自动驾驶还有什么搞头?LLM驱动的智能体应用探析!
系统回顾!基于Visual Transformer的分割模型综述
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
Corner Case不可怕!自动驾驶Corner Case可控生成系统性解决方案来优化!
自动驾驶汽车是如何在高精地图中建立精确位置的?
【IROS 2022】旅行时间减少47%!FAR Planner:使用动态可见性更新的快速、可尝试的路径规划
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
自动驾驶仿真框架CARLA教程(1):用Carla和Python编程自动驾驶汽车
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
ICRA2023 | 激光雷达相机内外参联合标定方案!
基于深度强化学习的自动驾驶决策仿真(Highway-env)
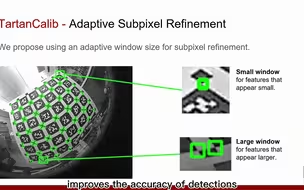
开源广角相机标定!TartanCalib:基于AprilTags自适应亚像素细化的迭代广角镜头标定(卡内基梅隆大学)
【全192集】不愧是吴恩达!一口气讲透CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络算法!简直不要太爽!
宏景智驾 | 通过3DBEV实现模拟目标检测、建图和定位
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
端到端趋势下,传统规控还有未来么?
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
为什么自动驾驶离不开模型部署?
B站强推!一口气学完人工智能入门到精通:机器学习+深度学习+强化学习,课程涵盖所有基础知识及项目实战,主打一个通俗易懂!
同济大佬倾力打造!三小时带你掌握【强化学习】基础原理及环境配置搭建,小白也能轻松掌握的通俗课程!
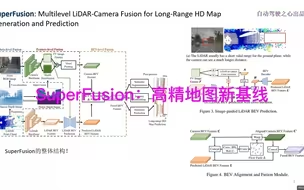
SuperFusion:高精地图新基线
为自动驾驶构建城市规模的神经辐射场
面向下一代自动驾驶:全栈里程碑综述汇总
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)