V
主页
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
发布人
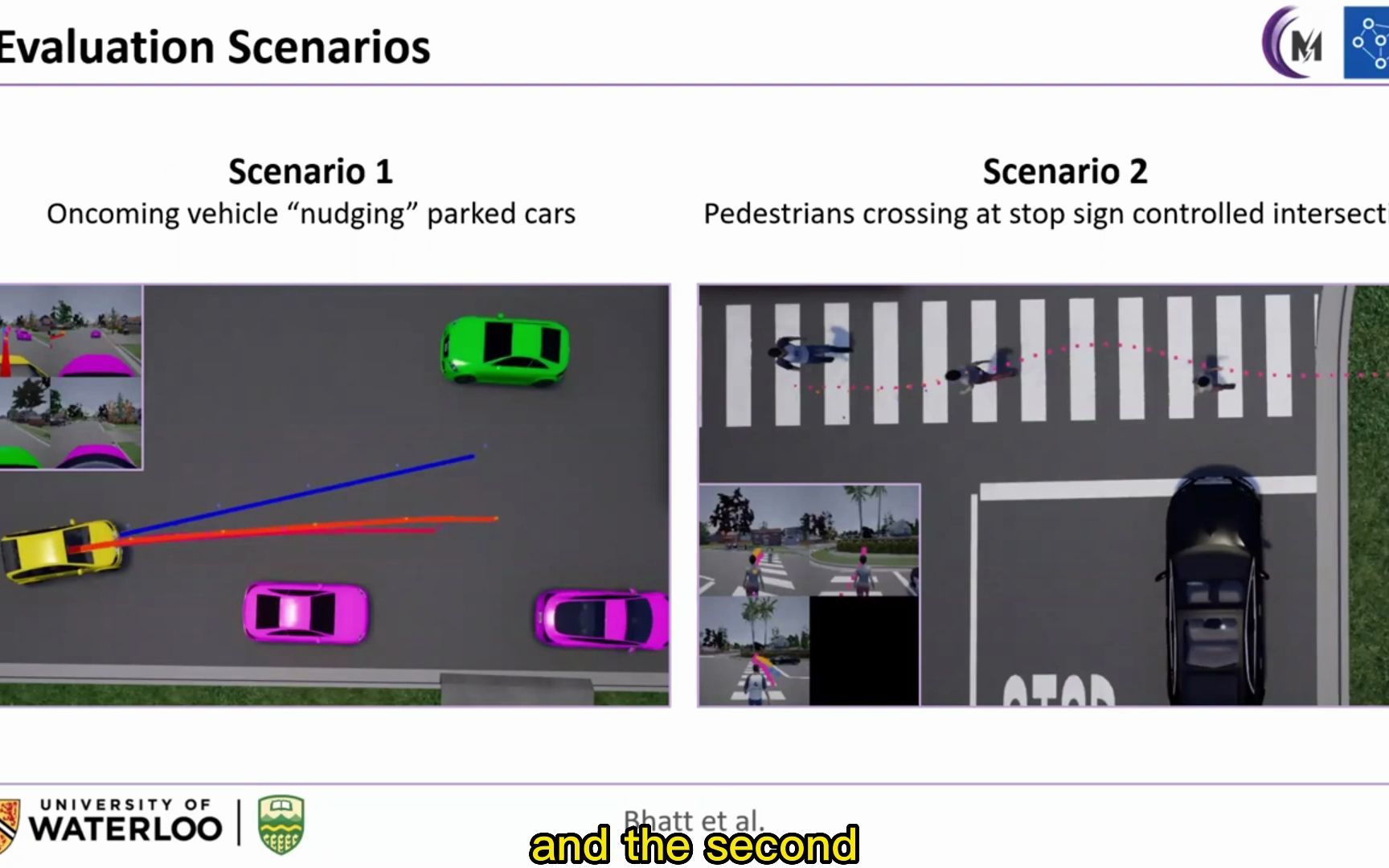
视频路径:https://www.youtube.com/watch?v=4DR7fqruLGo 论文题目:MPC-PF: Social Interaction Aware Trajectory Prediction of Dynamic Objects for Autonomous Driving Using Potential Fields(未发布)
打开封面
下载高清视频
观看高清视频
视频下载器
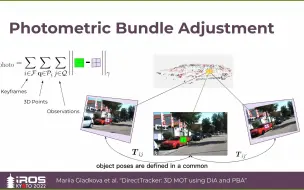
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
最新!如何使用深度强化学习在未知环境中进行导航?
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
自动驾驶安全的关键!| 轨迹预测中的经典模型大盘点
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
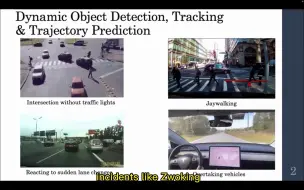
基于多传感器的自动驾驶动态目标检测、跟踪和轨迹预测
CVPR2022 | MeMOT:具有记忆的多目标跟踪
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
L4自动驾驶感知的终极形态会是协同感知吗?UCLA顶级博士告诉你答案!
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
使用概率深度补全的3D激光雷达重建(IROS2022)
StradVision - 语义分割和深度图预测demo
聊一聊多传感器目标跟踪中的最近邻匹配问题
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
【ICCV 2023】 CORE:协作重建助力多智能体协同感知!
WACV 2022 | SIDE:具有结构感知实例深度估计的基于中心的立体3D目标检测器
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
IROS2022最新思路 | RCA:自监督学习实现视觉导航(具有驾驶舒适性)
为自动驾驶构建城市规模的神经辐射场
端到端算法是什么?自动驾驶领域是怎么做的?
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
什么是端到端自动驾驶?什么是基础world model?
【IROS2022】超酷Demo | 使用稀疏4D卷积分割点云中的移动物体
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
泰裤辣!谷歌最新,一次跟踪所有目标!Everything and everywhere
自动驾驶多传感器数据融合(4):多目标跟踪算法
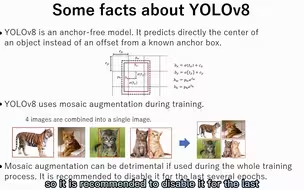
如何在ROS2中使用YOLOv8?
ICRA 2024 | 轨迹规划的终极状态
自动驾驶多传感器数据融合(3):单目标跟踪算法
MonoPLFlowNet:用于单目图像的现实尺度 3D 场景流估计(ECCV2022)
【IROS 2022】机器人超硬核点云配准方法:Linewise Non-Rigid Point Cloud Registration
ICRA2023 | 激光雷达相机内外参联合标定方案!
多模态3D检测相关2D和3D感知基础知识
南洋理工大学博士分享!规模化可学习与交互式的自动驾驶决策系统如何构建?
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
ICLR'24无图新思路!LaneSegNet:基于车道分段感知的地图学习(实时推理+三项SOTA)
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法