V
主页
ANYmal在金属、采矿厂进行机器人自主巡检
发布人
https://www.youtube.com/watch?v=GDLyiRICDII ANYmal 是一款专为工业挑战性环境设计的自主腿式机器人,它提供机动性、自主性和检查智能,可实现安全高效的检查操作。在这个虚拟展示中,了解 ANYmal 如何爬楼梯、从跌倒中恢复、执行自主任务和避开障碍物、自行停靠充电、数字化模拟传感器以及监控环境。
打开封面
下载高清视频
观看高清视频
视频下载器
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
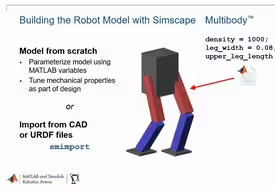
双足机器人的建模与仿真 MATLAB and Simulink
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
双足机器人步态生成 MATLAB and Simulink
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
人形机器人 手指机械结构
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
通过优化理论指导设计双足以达到控制和任务的最优
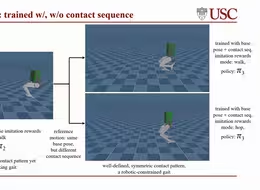
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
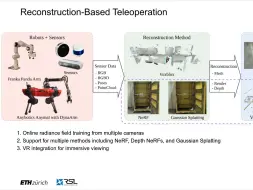
ETH | Anymal 机器人远程操作的辐射场
假得离谱,这是世界'最假的'机器人,穿上衣服差点看不出来了。
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
UCL 论文 DiPPeST:基于扩散的路径规划器,用于四足机器人的轨迹合成
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
MPC and RL, two different roads to legged locomotion, and that's OK
人形机器人灵巧手臂最新成果
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
使用普通商用零件低成本DIY构建四足机器人然后基于强化学习控制
博士论文答辩 - Alexander Schperberg - 统一基于模型的优化和机器学习
真牛!这个人形机器人吊打很多厂家的“产品”
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
PACC:一种使用 MPC 与四足机器人进行高负载协作搬运的被动臂方法
机器人跑出残影,时速46km/小时
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
山东大学机器人中心电动腿足组|人形机器人运动与全身控制
人形机器人腿部结构 基于 4DoF 球面并联机构
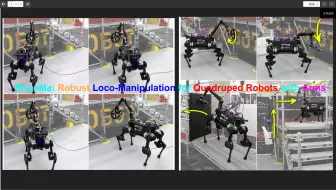
RoLoMa: Robust Loco-Manipulation for Quadruped Robots with Arms
波士顿动力 四足机器人Spot-工业检测机器人解决方案-化工厂场景
老年照护的未来?——人居环境机器人“5号”(The Five,小五)