V
主页
速度快!MobileNeRF:移动端实时渲染方案,Nerf导出Mesh
发布人
视频出自国内首个自动驾驶与Nerf论文带读课程:https://wrzpl.xet.tech/s/4mZ17z 欢迎关注【自动驾驶之心】公众号,干货资讯第一时间到达。 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) 1、国内首个基于Transformer的分割检测➕视觉大模型课 2、Occupancy从入门到精通全栈课程(理论➕实战) 3、自动驾驶中的多传感器融合与目标跟踪(从入门到精通) 4、国内首个多模态3D目标检测全栈教程(前融合/特征级融合/后融合) 5、YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 6、国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) 7、多传感器融合中的毫米波雷达-视觉融合感知全栈教程 8、Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 9、模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 10、规划控制理论&实战课程:PID、LQR、MPC全掌握 11、国内首个工业级车道线检测课程,从单目2D、单目3D到BEV车道线!!! 12、国内首门面向量产的单目3D与单目BEV感知教程!!! 13、Nerf与自动驾驶论文带读课程!!! 14、轨迹预测理论+实战教程!!! 15、轨迹预测与自动驾驶论文带读课程!!! 16、点云3D目标检测理论与实战教程!!! 17、国内首门毫米波&4D毫米波雷达理论实战教程!!! 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。
打开封面
下载高清视频
观看高清视频
视频下载器
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
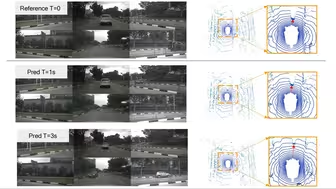
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
CVPR 2023最新!基于NeRF监督的深度立体视觉
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
【三维重建】InstantSplat:稀疏视角重建三维场景(无需SFM位姿)
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
为自动驾驶构建城市规模的神经辐射场
【3DGS】自定义相机教程(含代码)(三维高斯泼溅)
DeepLSD: 基于深度图像梯度的线段检测与细化
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
CVPR2023 | 利用神经辐射场提升全景三维场景理解的能力
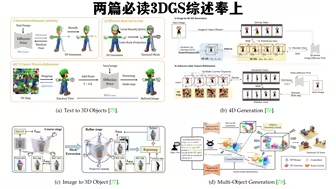
两篇与3DGS有关的综述奉上,<3DGS:调查、技术、挑战和机遇>主:<高斯分层:3D 重建与新新型视图合成>
各种grace m2 无顶框 光感红点到手闲测
用于激光雷达视图合成和三维重建的瞬态神经辐射场
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
3D Gaussian splatting 改进后室内重建效果
ECCV'24开源 | 谷歌最新涨点神器!通过3D感知微调提升2D特征
谁是目前市面上的最强软弹?红狗竹节测评!
NeRF如何监督Occupancy Networks?
精准8球好玩
什么是端到端自动驾驶?什么是基础world model?
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
【几何直觉】3D Gaussian Splatting(三维高斯泼溅), SuGaR 背后的几何 insight 讲解
ECCV'24 | 更快更准!Meta最新FPV-NeRF:将NeRF完美应用FPV!
我愿称之为2024年【计算机视觉与三维重建】入门天花板教程,北邮大佬用15个小时给它讲明白了,不愧是名校公开课!!!
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
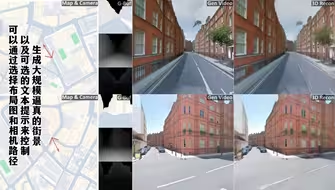
SIGGRAPH 2024 | Streetscapes:谷歌&斯坦福高调喊话:为智驾公司节省高开支,轻松实现“大规模街景生成
【三维AIGC】GSD:从单张视图中重建3DGS的扩散模型
【三维重建】pixelGS:像素控制密度的3DGS高斯喷溅
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
NERF佬的泰国必玩项目
UE5_Lumen_室内_54_UE室内可视化程序_样板间自由漫游任意开关门窗蓝图交互
逆天了!基于分层3D高斯表示的超大数据集实时渲染(SIGGRAPH 2024)
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM
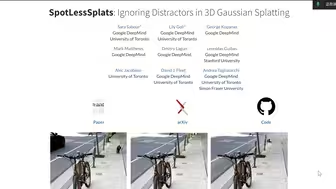
【三维重建】spotlessSplats:能忽略移动物体干扰的3DGS场景重建!
一文尽览:自动驾驶大语言模型应用综述分享