V
主页
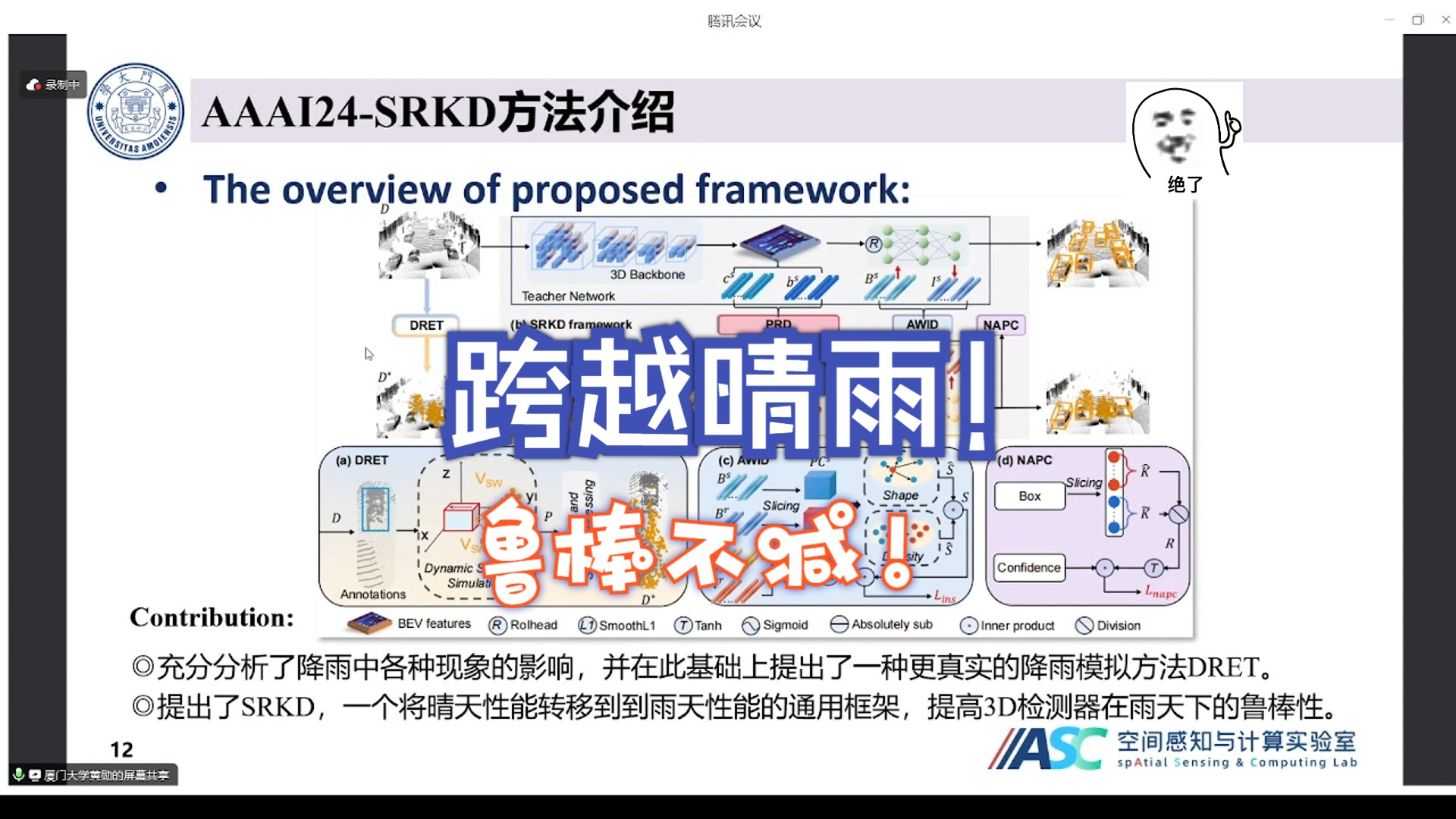
恶劣天气可拿捏不了我的鲁棒性!AAAI大佬来助攻
发布人
厦大力作!雨天气候下,基于激光雷达的三维目标检测模型由于扫描信号的退化和噪声,性能显著降低。作者提出了降雨数据模拟方法(DRET)与跨晴雨知识蒸馏框架(SRKD),该方法可在不会增加任何推理延时的前提下,显著提升多种三维目标检测器在雨天鲁棒性。完整版和更多资料请前往:https://t.zsxq.com/ydIrp!
打开封面
下载高清视频
观看高清视频
视频下载器
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
史上最全!一次性梳理自动驾驶鲁棒性研究
端到端自动驾驶:SparseDrive 算法详解
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
绝对前沿!全面剖析自动驾驶具身理解任务!
什么是端到端自动驾驶?什么是基础world model?
透彻!特斯拉occupancy network详解
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
实战超详细!Radar、Lidar和前置Camera的标定
最近一个月,Occupancy领域有哪些值得关注的工作?
在线高精地图与城市NOA是什么关系?为什么如此重要?
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
从0到1!彻底搞懂BEVFormer算法原理
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
ECCV2022 | Box2Mask:强!mAP-50达到全监督97%!
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
端到端算法是什么?自动驾驶领域是怎么做的?
经验之谈,轨迹预测真正重要的是什么?
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
轨迹预测到底预测个啥???轨迹预测入门必备!
最近有哪些自动驾驶方向的github仓库值得star?
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
香港科技大学最新!MARC:自动驾驶的多极和风险意识应急计划
ICRA2023 | 激光雷达相机内外参联合标定方案!
【kaggle有救了】2024年最全kaggle新人比赛项目实战教程,资深大佬手把手教你用python在kaggle摘金牌---强到离谱!/人工智能/科技
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
专注于学习PnC的端到端方法详解
规划控制都有哪些模块?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
【全100集】AI大模型课程:零基础入门必备教程!百万年薪大佬带你变身AI专家!涵盖大模型如何学习,AI项目实战 ,大模型入门,技术路线,原理详解 项目实战!
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
自动驾驶仿真大观:聊聊仿真的研究背景
ICCV 2023 | CVRecon:重新思考神经重建中三维几何特征学习