V
主页
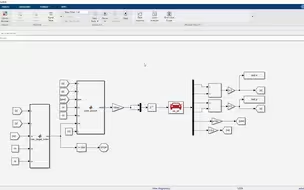
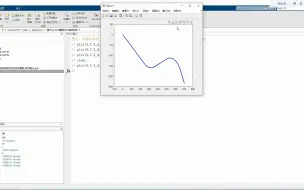
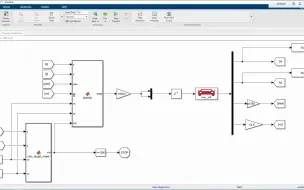
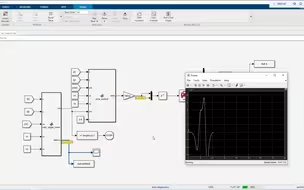
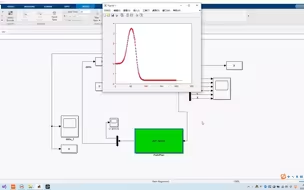
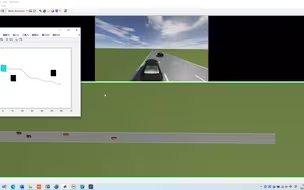
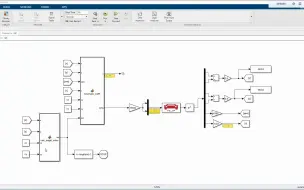
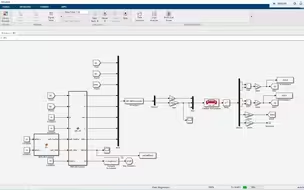
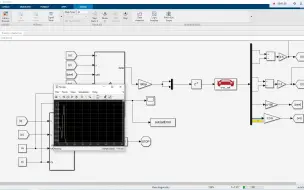
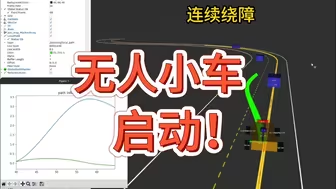
自动驾驶路径跟踪-纯跟踪和MPC算法的C++实现
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
路径跟踪 | 最优控制LQR算法实现(ROS C++/Python/Matlab)
自动驾驶控制-二自由度横摆动力学模型MPC跟踪任意路径
自动驾驶控制-动力学跟踪误差模型MPC路径跟踪
自动驾驶控制-基于车辆运动学模型的MPC路径跟踪
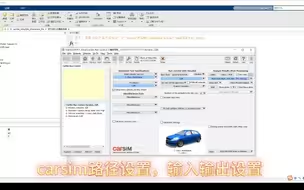
matlab与carsim联合纯跟踪路径跟踪算法仿真
自动驾驶控制-单点预瞄PID路径跟踪
自动驾驶控制-stanely路径跟踪仿真
自动驾驶控制-纯跟踪路径跟踪仿真
路径跟踪Stanely算法仿真
纯跟踪算法跟踪双移线路径
基于Nmpc的自动驾驶路径规划与MPC的路径跟踪
Stanely和Lqr算法的c++实现
强烈推荐!东南大学无人驾驶智能汽车技术全套教程!终于找到的精品公开课!存下吧,比啃书好多了!—卡尔曼滤波、激光雷达、目标检测、感知技术、神经网络、路径规划
RTK履带无人车户外曲线路径跟踪(精度3cm内)
自动驾驶控制-三自由度动力学模型mpc跟踪自定义路径
自动驾驶控制-基于mpc的速度跟踪控制
自动驾驶控制-非线性Nmpc跟踪双移线路径
自动驾驶控制-横纵向MPC轨迹跟踪控制
改编老王(决策规划)--控制用的mpc,另外可以实现超车
自动驾驶控制-动力学跟踪误差模型LQR路径跟踪
自动驾驶控制-基于车辆运动学模型的LQR路径跟踪
基于运动学模型的MPC跟踪双移线路径
Stanely算法跟踪双移线路径
吹爆!这可能是导师都不讲的自动驾驶最新版教程,不愧是北航硕士团队分享!3小时就带我跑通了自动驾驶感知融合实战!简直比刷剧还爽!
自动驾驶控制-纵向MPC横向LQR轨迹跟踪
《基于ROS2的决策规划算法工程开发》实机演示
自动驾驶控制-横向mpc纵向双pid轨迹跟踪
自动驾驶控制-运动学模型MPC跟踪圆形轨迹
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
基于运动学模型LQR跟踪双移线路径
c++实现的apollo_fem_smoother,用于参考路径的平滑
信奥赛冲刺拿奖:C++算法篇
04年大学生休学照顾瘫痪的妈妈,爸爸75岁,妈妈67岁。
与少年探讨自动驾驶,我们两个人谁的方案更好?
【C++面试100问】第八十九问:什么时候用指针传参?什么时候用引用传参?
信奥赛冲刺拿奖:跟着王老师学信奥赛之算法篇
无语!竟然还敢自学计算机!骂醒一个算一个!大学老师不会告诉你的事,知道的越早越好!
【C++面试100问】第九十二问:#pragma once与#ifndef的区别是什么
【已开源】秦通课题组新作入选IROS24!开启实车端到端泊车革命!
2024ai大模型人工智能算法工程师