V
主页
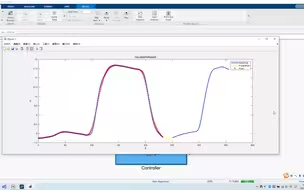
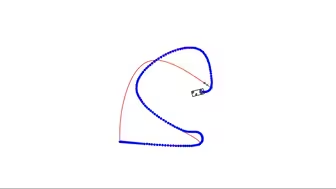
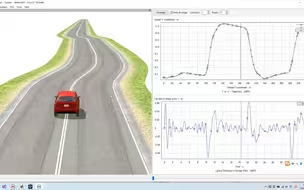
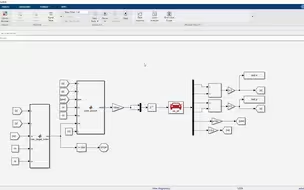
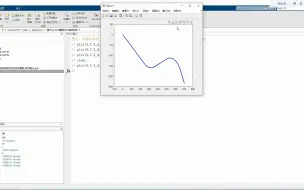
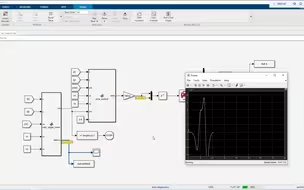
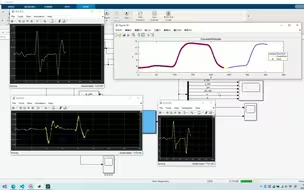
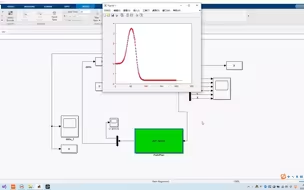
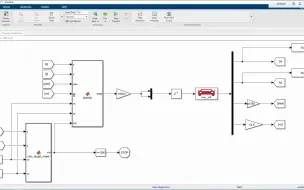
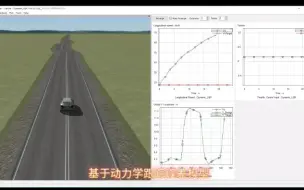
自动驾驶控制-横纵向MPC轨迹跟踪控制
发布人
横纵向耦合mpc跟踪五次多项式换道轨迹。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶控制-二自由度横摆动力学模型MPC跟踪任意路径
自动驾驶模型预测控制轨迹跟踪
自动驾驶控制-基于mpc的速度跟踪控制
自动驾驶路径跟踪-纯跟踪和MPC算法的C++实现
自动驾驶控制-基于车辆运动学模型的MPC路径跟踪
自动驾驶控制-纯跟踪路径跟踪仿真
自动驾驶控制-横向mpc纵向双pid轨迹跟踪
自动驾驶控制-运动学模型MPC跟踪圆形轨迹
自动驾驶控制-纵向MPC横向LQR轨迹跟踪
自动驾驶控制-动力学跟踪误差模型MPC路径跟踪
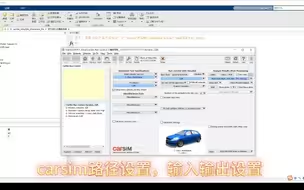
matlab与carsim联合纯跟踪路径跟踪算法仿真
自动驾驶控制-单点预瞄PID路径跟踪
纯跟踪算法跟踪双移线路径
自动驾驶控制-三自由度动力学模型mpc跟踪自定义路径
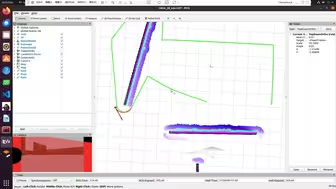
cartographer 2d 全局线段规划器 + MPC 轨迹跟踪 仿真demo
基于Nmpc的自动驾驶路径规划与MPC的路径跟踪
自动驾驶控制-stanely路径跟踪仿真
自动驾驶控制-动力学跟踪误差模型LQR路径跟踪
自动驾驶控制-基于车辆运动学模型的LQR路径跟踪
自动驾驶控制-非线性Nmpc跟踪双移线路径
MPC-Control-OSQP
模型预测控制学习资料汇总
青龙行走MPC+WBC
学习记录2:四足机器人MPC控制MATLAB计算仿真
路径跟踪Stanely算法仿真
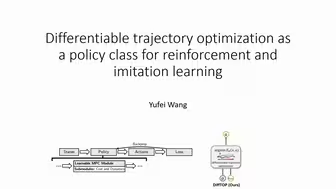
可微轨迹优化作为强化和模仿学习的策略表示
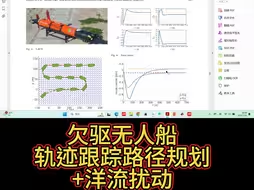
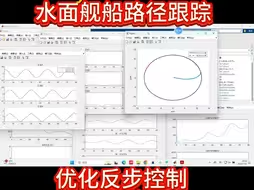
【顶刊复现】欠驱无人船轨迹跟踪+洋流扰动
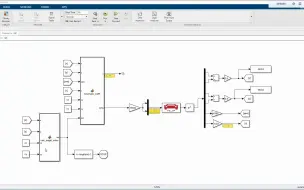
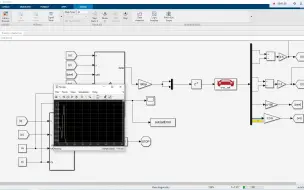
simulink与carsim 自动驾驶路径跟踪
顶刊 TNNLS 复现:基于强化学习的机械臂固定时间轨迹跟踪控制
电机版Atlas的模型预测控制
开源库,4款人形机器人MPC控制的开源库
Stanely算法跟踪双移线路径
顶刊:无人船轨迹跟踪 优化反步控制 强化学习 Actor-critic算法
汽车运动学与动力学系列-二自由度车辆动力学模型验证
四足,轮腿,人形开源项目
论文必看!遗传算法、蚁群算法、粒子群算法、模拟退火算法四大优化算法被一次性讲透了!绝对通俗易懂!
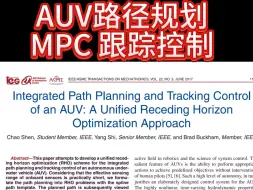
IEEE trans:水下机器人AUV的路径规划和基于模型预测控制MPC的跟踪框架
顶级视效公司!MPC 2024 年度作品集,你看过多少部?
TAC:事件触发 自适应 状态跟踪控制线性部分时变连续时间(CT)系统,模型参考自适应控制(MRAC),非线性状态相关匹配参数不确定性