V
主页
京东 11.11 红包
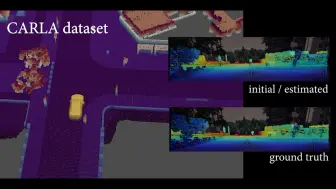
OmniSLAM:宽基线多相机系统的全方向定位和稠密建图
发布人
https://youtube.com OmniSLAM: Omnidirectional Localization and Dense Mapping for Wide-baseline Multi-camera Systems PDF下载:https://arxiv.org/pdf/2003.08056.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
1-1课程内容与预备知识
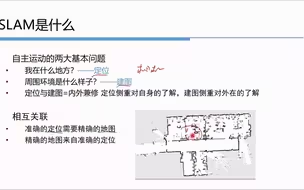
1-2 SLAM是什么
5-1 特征点提取与匹配
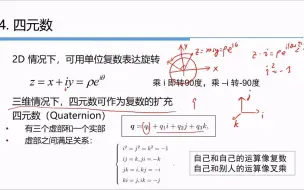
2-4 四元数
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
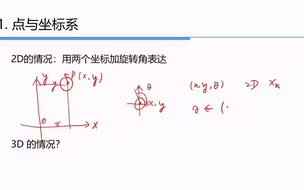
2-1 点与坐标系
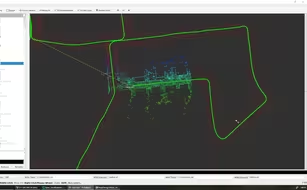
A Compact LiDAR Odometry and Mapping with Dynamic Removal
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
“北斗导航与多源增强”学术沙龙(北斗导航篇)
【ICRA2021】固态激光雷达的轻型三维定位和建图
ORB-SLAM3- TUM-VI Monocular-Inertial, Outdoors6
2-2 旋转矩阵
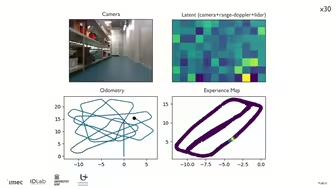
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
ORB_SLAM3实跑教程
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
ChainSLAM实时建图演示
【ICRA2021】自动驾驶和地图学习的定制地标表示的自动建图
基于先验地图的通用激光雷达定位框架
基于ROS2的树莓派自主定位与导航小车
动态环境中并行轨迹优化
【ICRA2021】3647-使用相对深度先验的偏振单目稠密建图
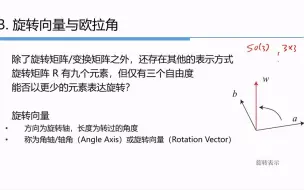
2-3 旋转向量和欧拉角
【SLAM】LoopSplats:通过直接的3DGS注册,实现密集建图和在线回环检测的全局一致性图优化
IROS24:BE-SLAM: BEV-Enhanced Dynamic Semantic SLAM with Static Object Reconstruc
1-3 视觉SLAM的数学描述
【ICRA2021】PSF-LO:基于参数化语义特征的激光雷达里程计
【ICRA2021】HyperMap:单目相机注册的压缩3D地图
2-5 实战环节
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
【ICRA2021】TT-SLAM:用于平面环境的密集单目 SLAM
DA4AD-基于端到端深度注意的自动驾驶视觉定位
【ICRA2021】MaAST:使用语义转换器进行地图注意力以实现高效的视觉导航
1-4 Linux下的C++基础
【ICRA2021】相机IMU UWB的距离聚焦融合用于精确和减少漂移的定位
【SLAM】高翔-视觉SLAM十四讲 配套视频
机器人自助定位导航之路的探索