V
主页
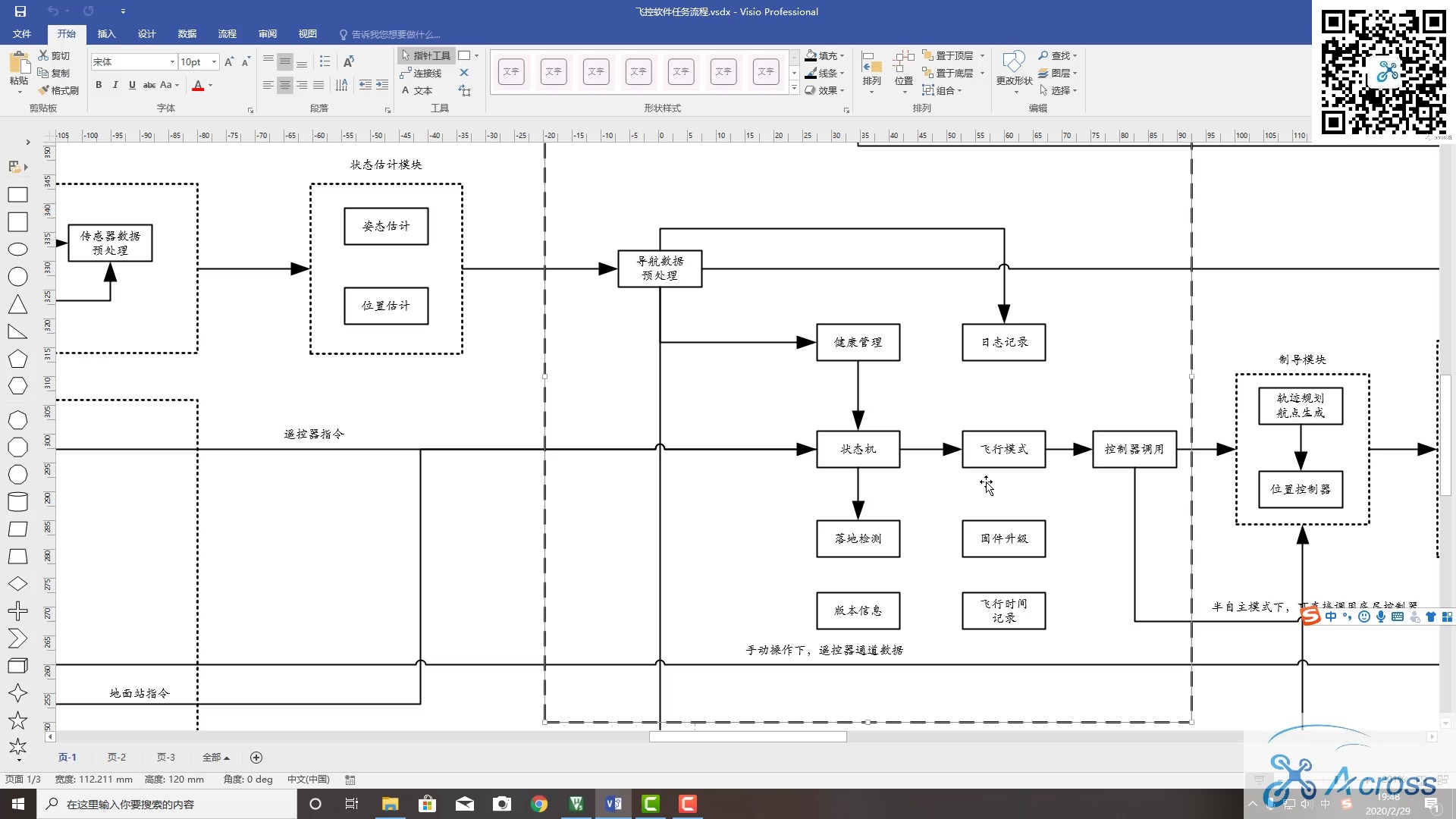
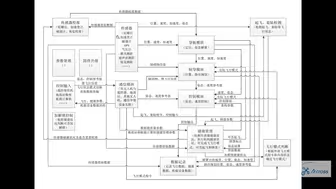
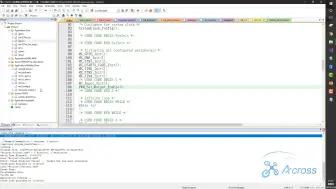
21 飞行模式、状态机、控制器调度的C代码实现
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
飞控姿态解算算法
08 数据处理-陀螺仪数据
10.3 GPS读取代码解读
04 飞控算法基础之卡尔曼滤波
01 飞控软件概要
F04 自制火箭系列-飞控代码模块-LORA天地通讯
03 飞控算法基础之PID控制
3.2 飞控算法基础之PID控制_2
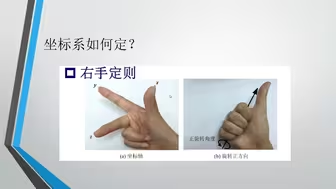
05 姿态解算基础-坐标系 欧拉角 四元数概念
13.2 mavlink代码移植
09 ringbuffer环形队列
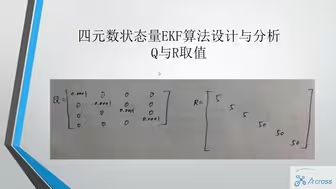
13 姿态解算_4
10 姿态解算_1
12 姿态解算_3
17 高度估计matlab仿真
11 姿态解算_2
自写飞控,搞了三个月终于能勉强起飞了
09 数据处理-地磁数据
14 双机通信
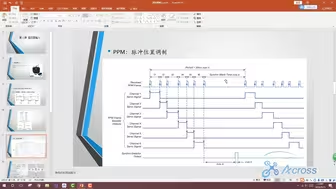
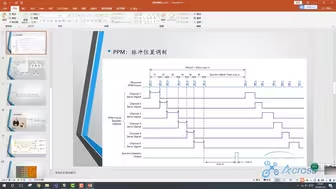
11.1 遥控器协议PPM SBUS简介
19 姿态估计的C代码实现
14 姿态解算_5
PID控制平衡车,从直立环速度环到转向环。第一步调直立环和速度环很重要,保证抗干扰能力要强
11.2 PPM SBUS 代码解析
07 数据预处理-IMU数据滤波_2
23 飞行前调试1
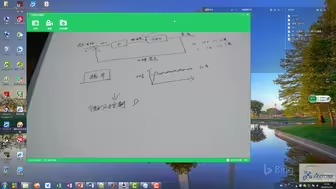
02 飞行模式、状态机设计
8.3 hmc5883采集
01 漫谈freertos
20 控制器的C代码实现
飞控教程第16课 pixhawk位置估计互补滤波算法解读
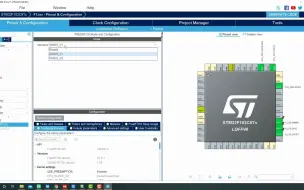
3.1 硬件DIY
【简飞】舰队:习惯了
组合导航基础知识-飞控位置估计
06 数据预处理-IMU数据滤波_1
8.2 I2C软件模拟编程
12 PWM输出
3.1 飞控算法基础之PID控制_1
02 freertos基础与LED控制
【硬核】低成本十轴姿态解算模块