V
主页
SLoMo: A General System for Legged Robot Motion Imitation from Casual Videos
发布人
SLoMo: A General System for Legged Robot Motion Imitation from Casual Videos Abstract We present SLoMo: a first-of-its-kind framework for transferring skilled motions from casually captured video footage of humans and animals to legged robots. SLoMo works in three stages: 1) synthesize a physically plausible reconstructed key-point trajectory from monocular videos; 2) optimize a dynamically feasible reference trajectory for the robot offline that includes body and foot motion, as well as contact sequences that closely tracks the key points; 3) track the reference trajectory online using a general-purpose model-predictive controller on robot hardware. Traditional motion imitation for legged motor skills often requires expert animators, collaborative demonstrations, and/or expensive motion capture equipment, all of which limits scalability. Instead, SLoMo only relies on easy-to-obtain monocular video footage, readily available in online repositories such as YouTube. It converts videos into motion primitives that can be executed reliably by real-world robots. We demonstrate our approach by transferring the motions of cats, dogs, and humans to example robots including a quadruped (on hardware) and a humanoid (in simulation). To the best knowledge of the authors, this is the first attempt at a general-purpose motion transfer framework that imitates animal and human motions on legged robots directly from casual videos without artificial markers or labels. paper link: https://ieeexplore.ieee.org/abstract/document/10246373 code : https://github.com/johnzhang3/SLoMo?tab=readme-ov-file 假开源? video: https://www.youtube.com/watch?v=bvoM-nBd7lM
打开封面
下载高清视频
观看高清视频
视频下载器
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
有开源github代码! RA-L论文 人形机器人的多接触全身控制
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
人形机器人足底机械结构设计
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
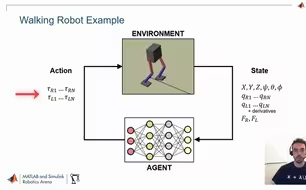
双足机器人步态生成 MATLAB and Simulink
基于分层优化的四足机器人全身运动控制搬运重物
Part 3 (Final) - How to Solve Inverse Kinematics of a 4 Leg Robot
通过对抗运动先验学习四足机器人的双足行走
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
Deep Compliant Control for Legged Robots
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
How to design nonlinear MPC with deep learning prediction model
Resilient Legged Local Navigation
人形机器人 手指机械结构
Model and data, two essential ingredients for controlling legged robot
Learning whole-body manipulation for quadrupedal robot
基于信号时序逻辑引导MPC的抗扰动双足机器人
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
Versatile Skill Control via Self-supervised Adversarial Imitation
Event Camera Visual Odometry for Dynamic Motion Tracking of a Legged Robot
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
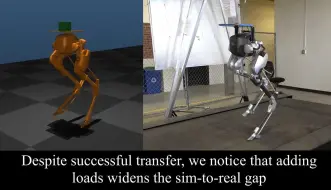
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
[RSS 24] Rethinking Robustness Assessment 重新思考鲁棒性评估
Online trajectory optimization for dynamic aerial motions of a quadruped robot
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
Visual CPG-RL: Learning Central Pattern Generators for Visually-Guided Quadruped
Panoptic-SLAM:使用全景分割的动态环境中的视觉 SLAM 代码已开源
Vision-Based Terrain-Aware Locomotion for Legged Robots ---T-RO
双足机器人的深度强化学习- MATLAB and Simulink
人形机器人灵巧手臂最新成果
Topology-Based MPC for Automatic Footstep Placement and Contact Surface Selectio