V
主页
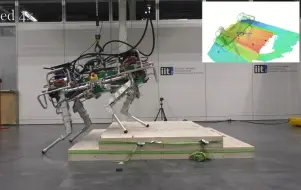
(ICRA 2024)Contrastive Initial State Buffer for Reinforcement Learning
发布人
https://www.youtube.com/watch?v=RB7mDq2fhho (ICRA 2024)Contrastive Initial State Buffer for Reinforcement Learning Abstract In Reinforcement Learning, the trade-off between exploration and exploitation poses a complex challenge for achieving efficient learning from limited samples. While recent works have been effective in leveraging past experiences for policy updates, they often overlook the potential of reusing past experiences for data collection. Independent of the underlying RL algorithm, we introduce the concept of a Contrastive Initial State Buffer, which strategically selects states from past experiences and uses them to initialize the agent in the environment in order to guide it toward more informative states. We validate our approach on two complex robotic tasks without relying on any prior information about the environment: (i) locomotion of a quadruped robot traversing challenging terrains and (ii) a quadcopter drone racing through a track. The experimental results show that our initial state buffer achieves higher task performance than the nominal baseline while also speeding up training convergence. Content This repository contains the code for the Contrastive Initial State Buffer (CL-Buffer), which can be installed as a Python library. The repository does not contain the code for training an RL agent in an environment (Drone Racing or Legged Locomotion). However, with the given toy example (toy_example.py), it is straightforward to implement the CL-Buffer in an existing RL framework. https://rpg.ifi.uzh.ch/docs/ICRA24_Messikommer.pdf https://github.com/uzh-rpg/cl_initial_buffer
打开封面
下载高清视频
观看高清视频
视频下载器
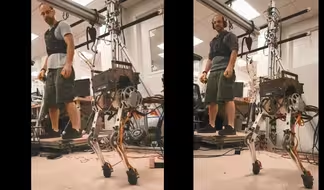
她的第一次行走,直腿,自然柔软!
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
今年单子越来越多流水越来越大,没办法只能注册公司,不想把时间浪费在杂事上,一年花3800找了个代记账公司帮我报税交社保。在西安租了一套90平的房子做办公室
真牛!这个人形机器人吊打很多厂家的“产品”
人形机器人灵巧手臂最新成果
Control is dead ?control+ learning才是未来
Bipedal Safe Navigation over Uncertain Rough Terrain
人形机器人足底机械结构设计
这下真狗了 Boston Dynamics
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
中国制造“飞行救生圈”救人视频火了!救援范围1000米,无视环境影响?美国网友惊呼:这才是科技造福人类!
从工业巨头到人形助手:ICRA 2024亮点
酷!哈工大高会军教授、李湛副教授团队研发出新型矢量飞行机器人
Online trajectory optimization for dynamic aerial motions of a quadruped robot
Learning Morphologically Adaptive Locomotion Controllerfor Quadruped
Reinforcement learning for blind stair climbing with legged and wheeled robot
2024智源大会 特邀报告 Reinforcement Learning with Large Datasets
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
(RA-L 23) Reactive Landing Controller for Quadruped Robots
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
通过优化理论指导设计双足以达到控制和任务的最优
机器人挤奶,拒绝剥削!你好,它也好
Foothold Evaluation Criterion for Dynamic Transition Feasibility for Quadruped
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
ICRA 24 Adaptive Whole-body Robotic Tool-use Learning on Low-rigidity Humanoids
SLoMo: A General System for Legged Robot Motion Imitation from Casual Videos
Boston Dynamics Stretch at MODEX 2024
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
(Humanoids 2022)Continuous Jumping of RAMIEL Using Reinforcement Learning
NASA’s first humanoid robot Valkyrie is being tested in Australia
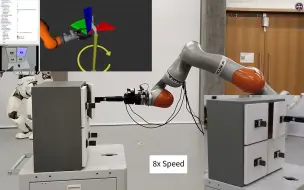
Online Estimation of Articulated Objects with Factor Graphs using Vision
Humanoid robot research result highlights in 2022- CNRS-AIST JRL
IHMC Atlas walking through a hatch holding a fire hose