V
主页
京东 11.11 红包
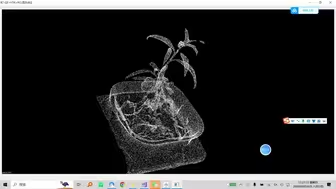
用于激光雷达视图合成和三维重建的瞬态神经辐射场
发布人
用于激光雷达视图合成和三维重建的瞬态神经辐射场 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) ①YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 ②国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) ③多传感器融合中的毫米波雷达-视觉融合感知全栈教程 ④Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 ⑤模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 ⑥规划控制理论&实战课程:PID、LQR、MPC全掌握 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。
打开封面
下载高清视频
观看高清视频
视频下载器
ICCV 2023 | NeO 360: 用于户外场景稀疏视图合成的神经场
超详细的激光雷达相机标定教程!(Lidar-Camera)
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
NeurlPS'24开源 | GaussianCube 一种用于三维生成建模的结构化和 显式辐射表示,引领三维重建新范式
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
从轿车到SUV | 英伟达通过动态视图合成的不断突破!
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
速度提高60倍!重建你的自动驾驶场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
双目摄像头三维重建
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
MatrixCity:基于神经渲染的大规模城市场景合成数据集(港中文&上海AI Lab)
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
三维空间扫描仪,轻松重建小树林
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
【IROS2022】Voxfield:用于在线规划和三维重建的非投影符号距离场
ICRA2023 | 激光雷达相机内外参联合标定方案!
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
这也太全了!迪哥手把手带你入门【3D点云+三维重建】实战,从原理解析到项目实战 -NeuralRecon/PointNet
CVPR2023 | 利用神经辐射场提升全景三维场景理解的能力
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第3节:车路协同场景激光雷达部署策略优化方法
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
LIO-SAM:一种紧耦合激光雷达-惯性里程计
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
VTK+Qt+PCL+VS显示点云 点云处理 PCL点云库VTK三维重建 PCL 点云 点云处理
带你走入激光雷达LiDAR点云重建的地下矿山巷道,轻松探索虚拟三维世界!
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
搞懂了!原来激光雷达和相机的内外参是这样标定的
聊一聊4D成像雷达在辅助驾驶领域的应用
鱼眼相机和超声波雷达是怎么做融合的?
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
网传极氪车主高速上用自动驾驶,司机和副驾竟盖着被子睡觉,网友炸锅