V
主页
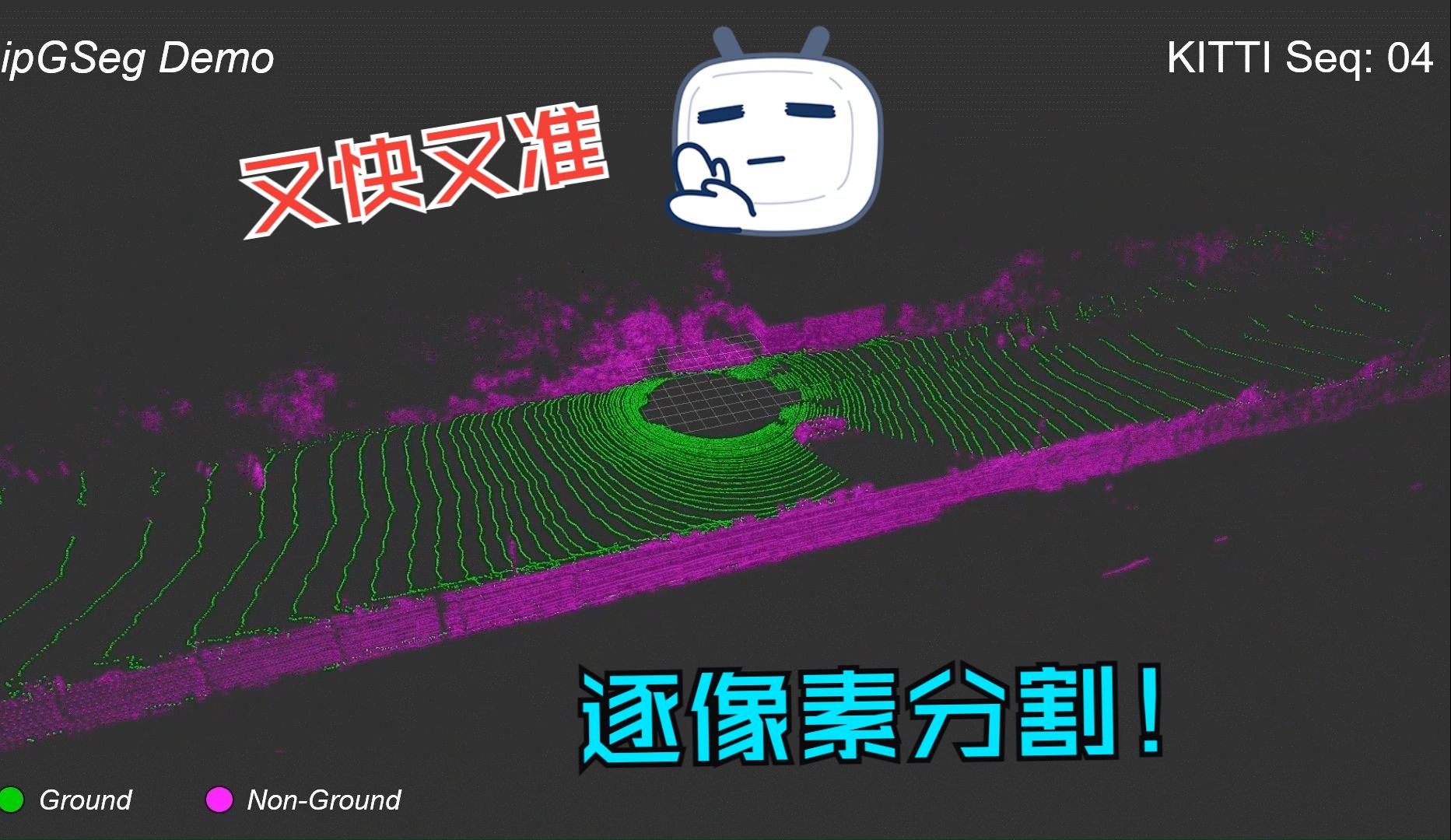
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
发布人
香港城市大学 EEPT LAB 最新工作分享! DipG-Seg 是一种基于图像表示的快速、准确的3D LiDAR点云地面分割算法。 该方法是逐像素的,可以看作是3D点云上逐点分割的对等方法。 尽管该方法进行逐像素的分割,但是它非常高效且准确。 DipG-Seg的特点是: 1. 完全基于图像的地面分割框架。而且,很容易通过调小图像的分辨率来进一步加速分割,且对结果只有轻微影响。 2. 准确且超快。 DipG-Seg可以在Intel NUC (i7 1165G7)上以超过120Hz的速度运行(图像表示的分辨率为64×870),在 SemanticKITTI 数据集上实现超过94%的精度。 3. 对 LIDAR模型和多样性场景具有鲁棒性。 论文所给参数能够使得DipG-Seg在 64、32和16线LiDAR下得到满意的结果,同时,算法在nuScenes和SemanticKITTI的数据集上表现优秀。
打开封面
下载高清视频
观看高清视频
视频下载器
超详细的激光雷达相机标定教程!(Lidar-Camera)
端到端算法是什么?自动驾驶领域是怎么做的?
ECCV'24 | Gaussian Grouping解决3DGS的对象级场景理解问题,实现3D场景任意分割和编辑
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
适用任意相机模型!高通提出的BEV分割框架DaF-BEVSeg来了
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
端到端自动驾驶:SparseDrive 算法详解
自动驾驶汽车是如何在高精地图中建立精确位置的?
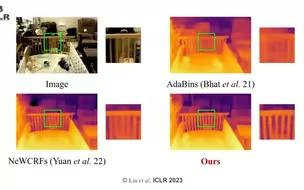
ICLR 2023 |VA-DepthNet:单目图像深度预测的变分方法
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
CVPR 2023 | Mask DINO:面向检测和分割的统一Transformer最强框架!
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
自动驾驶落地离不开的C++!快来实现第一个自动驾驶模块吧
MonoPLFlowNet:用于单目图像的现实尺度 3D 场景流估计(ECCV2022)
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
实战超详细!Radar、Lidar和前置Camera的标定
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
端到端算法有哪些优势?完爆传统感知规控?
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
史上最全!一次性梳理自动驾驶鲁棒性研究
轨迹预测到底预测个啥???轨迹预测入门必备!
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
关于自动驾驶的一切(层级划分/Lidar/Radar/视觉感知/AI与发展等)
iCAR 2023 | PolyMerge:一种利用多段线进行动态高精地图更新的新技术
透彻!特斯拉occupancy network详解
最新!如何使用深度强化学习在未知环境中进行导航?
Segment Any Point Cloud:运用视觉基础模型分割一切点云
校招和社招转行人必看!2023年如何入局自动驾驶?
自动驾驶规划控制的未来是什么?
毫米波雷达视觉算法CRAFT,这次彻底理解了!
最新!DiscoNet:稀疏遮挡Lidar点云下的鲁棒3D感知方法!
规划控制都有哪些模块?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
直接制霸天空!ICRA’24 最新基于强化学习的MPC算法,苏黎世大学出品!
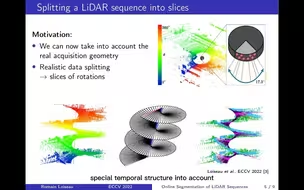
速度超快!激光雷达序列的在线分割:数据集和算法(ECCV2022)
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)