V
主页
1-7移动机器人的关键性能指标
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
4-35移动机器人平面运动轨迹规划方法-参数优化法
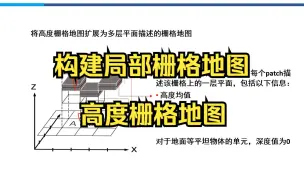
5-10构建局部栅格地图-高度栅格地图
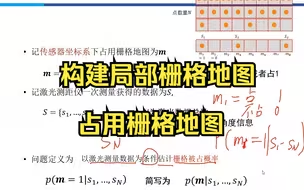
5-9构建局部栅格地图-占用栅格地图
7-6工业机器人控制系统的关键组成部件-电机
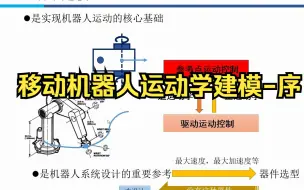
3-1移动机器人运动学建模-序
7-8工业机器人控制系统的关键组成部件-示教器及其他
3-2自主移动机器人-轮子的类型
3-7运动合成作用建模-四轮差动底盘(机器人)
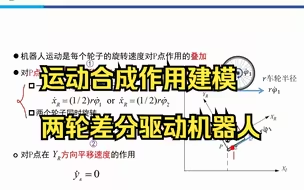
3-5自主移动机器人-运动合成作用建模-两轮差分驱动机器人
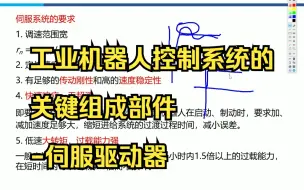
7-7工业机器人控制系统的关键组成部件-伺服驱动器
3-4自主移动机器人-轮式移动机器人运动学建模主要方法及分析假设条件
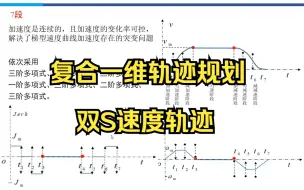
4-30复合一维轨迹规划-双S速度轨迹
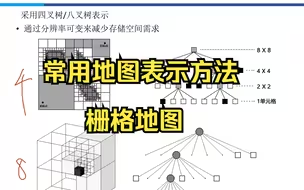
5-4常用地图表示方法-栅格地图
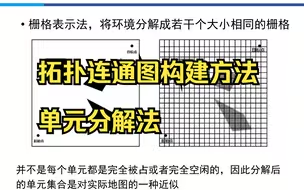
4-7拓扑连通图构建方法-单元分解法
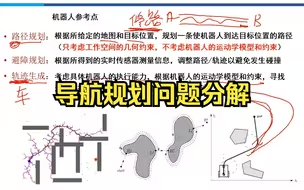
4-2导航规划问题分解
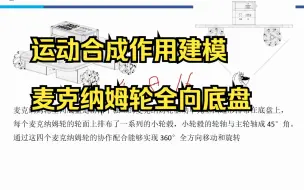
3-10自主移动机器人-运动合成作用建模-麦克纳姆轮全向底盘(机器人)
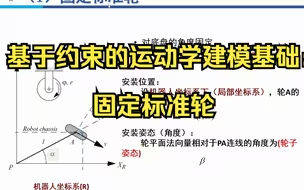
3-14自主移动机器人-基于约束的运动学建模基础:固定标准轮
4-15最优路径搜索算法-Dijkstra算法
3-7DH4个参数的练习
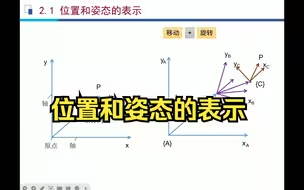
2-1位置和姿态的表示
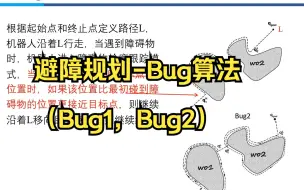
4-19避障规划-Bug算法(Bug1,Bug2)
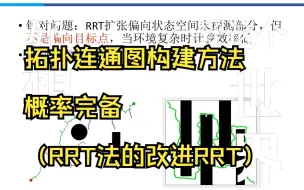
4-11拓扑连通图构建方法--概率完备(RRT法的改进RRT)
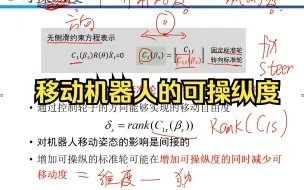
3-27移动机器人的可操纵度
5-1地图概述
2-Matlab基本操作
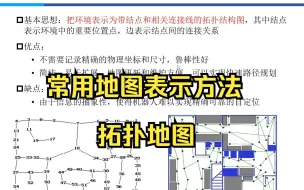
5-6常用地图表示方法-拓扑地图
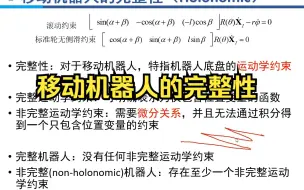
3-29移动机器人的完整性
6-4里程估计方法-基于电机码盘
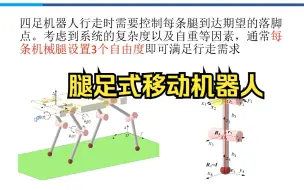
3-33腿足式移动机器人
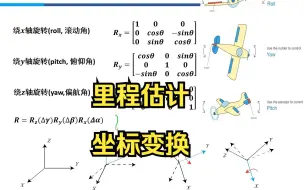
6-1里程估计-坐标系变换
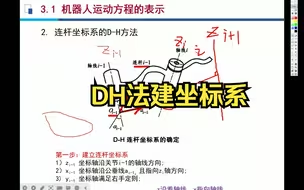
3-3DH法建坐标系
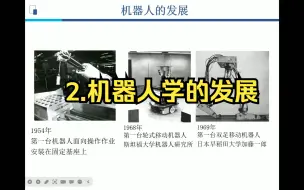
2.机器人学的发展
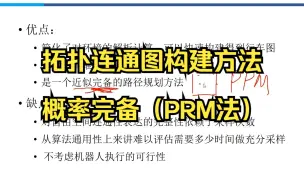
4-9拓扑连通图构建方法--概率完备(PRM法)
6-7激光里程计的迭代最近点ICP算法简介
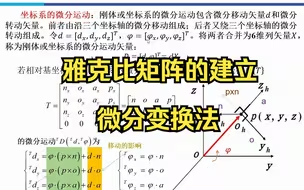
4-7雅克比矩阵的建立-微分变换法
3-0机器人模型及连杆
3-26自主移动机器人的可移动度-基于约束分析
2-初识机器人工具箱
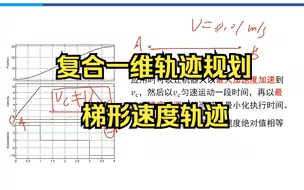
4-29复合一维轨迹规划-梯形速度轨迹
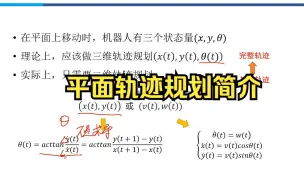
4-31平面轨迹规划简介