V
主页
京东 11.11 红包
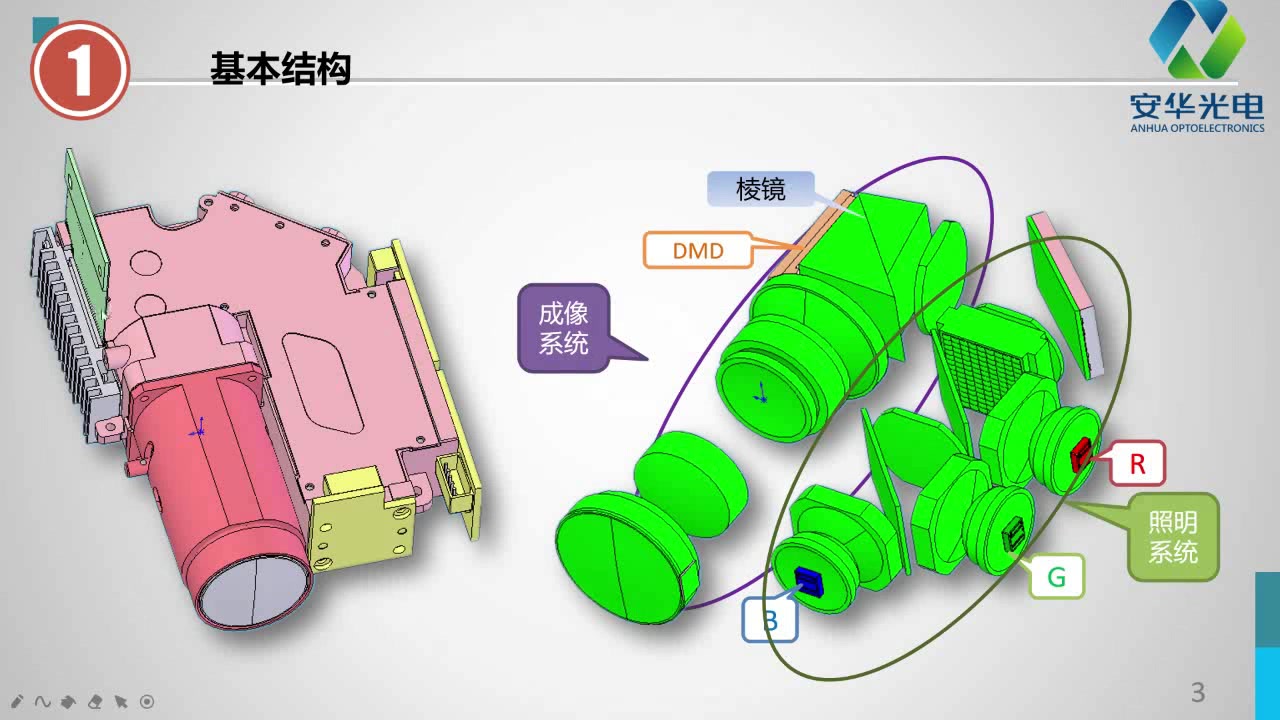
【3D视觉工坊】第十一公开课:结构光3D相机光机核心技术及3D成像性能分析
发布人
在公众号「3D视觉工坊」后台,回复「光机」,即可获得课件。 课程大纲: 1.光机照明系统 2.光机成像系统 3.光机技术指标及光机选型 4.3D成像性能分析
打开封面
下载高清视频
观看高清视频
视频下载器
【3D视觉工坊】第十三公开课:基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
相机标定的基本原理与经验分享
光学3D测量技术原理及应用
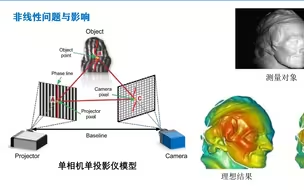
结构光的非线性问题与校正
【3D视觉工坊】第七期公开课:图像对齐算法
自动驾驶中的视觉感知技术
【3D视觉工坊】第十六期 视觉惯性SLAM之多约束扩展卡尔曼滤波
【3D视觉工坊】第十五期 嵌入式开发漫漫之路——从小白到技术骨干
【3D视觉工坊】第四期公开课:求职经验分享
基于事件相机的三维结构光技术ESL,性能好于Realsense技术!
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
高速结构光三维面形测量方法
大作业|激光-视觉-IMU-GPS融合SLAM算法
[非完整版]基于结构光投影三维重建技术系列课程-绪论
视觉快速定位与实时稠密简图简介
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
北交博士主讲:深度学习驱动下的相机标定技术发展(上篇)
点云3D深度学习模型与实践
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
无人机|PID算法详解与实战(上)
机械臂抓取-开发环境搭建
Transformer模型结构
Open3D与点云处理简介(公开课)
OA-SLAM:在视觉SLAM中结合物体语义进行相机重定位[ISMAR 2022]
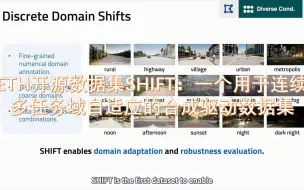
ETH开源数据集SHIFT:一个用于连续多任务域自适应的合成驱动数据集 @3D视觉工坊 #CVPR2022
重磅开源!连你的微表情都可以轻松还原!SMIRK超强3D面部重建技术!
无需真实机械臂也可以训练具身大模型!通过Robostudio的R2S2R工具链来采集训练和部署机器人策略
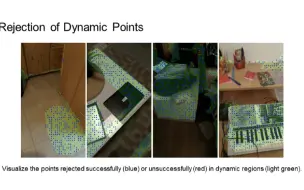
室内动态变化场景中的相机重定位(CVPR2021)
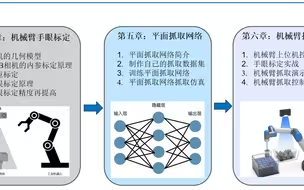
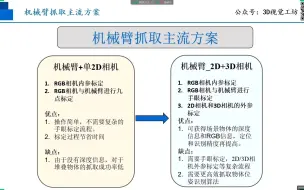
机械臂抓取简介
上海 AI Lab&同济大学!基于八叉树结构的3D高斯体渲染方法,实现一致的实时渲染性能
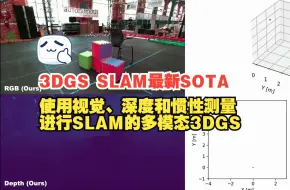
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
四旋翼模型与控制基础
Occupancy的工程细节
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
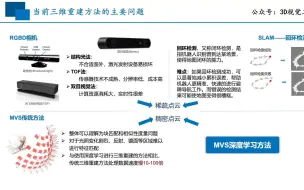
多视图几何MVS简介及MVSNet如何高效入门?
自动驾驶实战课之多相机间的同步实战
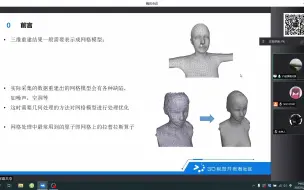
三维重建中的网格处理算法分享(公开课)
戴森机器人实验室发布SuperPrimitive:三维重建&视觉里程计&深度补全轻松搞定!