V
主页
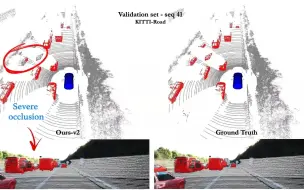
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
发布人
项目地址:https://le2ed.mit.edu/ 论文链接:https://arxiv.org/abs/2105.09932v1 虽然激光雷达传感器能够提供更可靠准确的信息,但现有的端到端驱动解决方案主要基于camera,因为3D数据数据处理需要大量内存占用和计算成本。基于此,MIT团队提出了一种高效鲁棒的框架Fast-LiDARNet,该系统能够仅使用原始3D点云和粗粒度GPS地图实现对全尺寸自动驾驶车辆的有效和鲁棒控制。
打开封面
下载高清视频
观看高清视频
视频下载器
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
Nerf+SLAM会擦出什么样的火花?
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
IROS2022最新 | 基于激光雷达的三维运动目标分割的高效时空信息融合
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
激光雷达3D目标检测算法有哪些?怎么分类的?
多模态3D检测相关2D和3D感知基础知识
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
高精地图制作关键技术及领域主流方案分享-part1
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
CVPR 2023 | Mask DINO:面向检测和分割的统一Transformer最强框架!
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
多传感器融合!BEV感知融合算法介绍
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
IROS 2024 | NAVINACT:结合导航和模仿学习进行增强强化学习
毫米波雷达视觉算法CRAFT,这次彻底理解了!
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
最新!CoRL 2022 |Waymo分享自动驾驶行为 模型方案
端到端算法有哪些优势?完爆传统感知规控?
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
多障碍物联合预测!理论全搞定~
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
搞懂了!原来激光雷达和相机的内外参是这样标定的
在线高精地图与城市NOA是什么关系?为什么如此重要?
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
相机和激光雷达融合的多车辆跟踪demo
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
自动驾驶如何学好C++?
用于激光雷达视图合成和三维重建的瞬态神经辐射场
自动驾驶多传感器数据融合(1):什么是多传感器融合?
BEVCar:SOTA!RV融合完成地图和分割双任务