V
主页
DeepMind x UCL RL Lecture Series-Theoretical Fund of Dynamic Programming Algo 4
发布人
https://youtu.be/XpbLq7rIJAA?list=PLqYmG7hTraZDVH599EItlEWsUOsJbAodm DeepMind x UCL RL Lecture Series - Theoretical Fund. of Dynamic Programming Algorithms 4
打开封面
下载高清视频
观看高清视频
视频下载器
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
通过优化理论指导设计双足以达到控制和任务的最优
Go2使用教学04-标定教程
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
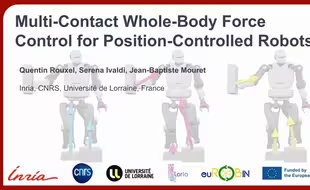
有开源github代码! RA-L论文 人形机器人的多接触全身控制
THEMIS在那几天里微信运动榜上有名
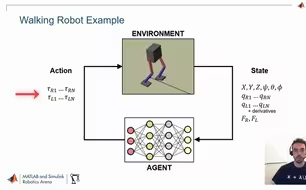
双足机器人的深度强化学习- MATLAB and Simulink
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
Highly dynamic gaits controlled by a whole-body MPC
双足机器人步态生成 MATLAB and Simulink
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
人形机器人足底机械结构设计
Go2使用教学05-运动姿态介绍
MuJoCo 仿真 案例欣赏
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
波士顿动力 四足机器人Spot-工业检测机器人解决方案-化工厂场景
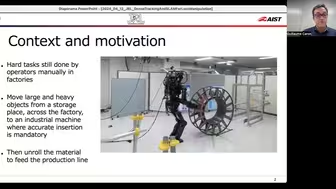
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
Go2开发教学05-底层服务接口
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
Go2使用教学08-笨笨狗
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
Deep Compliant Control for Legged Robots
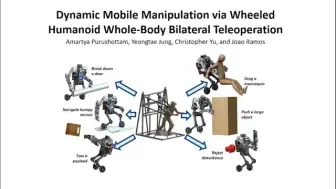
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
模型预测控制简介
Ghost Robotics 爬楼梯 不错哟
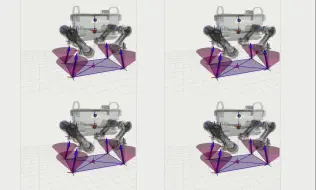
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
write a ROS2 subscriber with Python P8
Go2使用教学01-开箱
Vision-Based Terrain-Aware Locomotion for Legged Robots ---T-RO
基于模型控制的人形机器人行走 MATLAB and Simulink
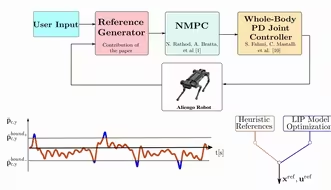
Optimization-Based Reference Generator for Nonlinear Model Predictive Control
How to design nonlinear MPC with deep learning prediction model
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid