V
主页
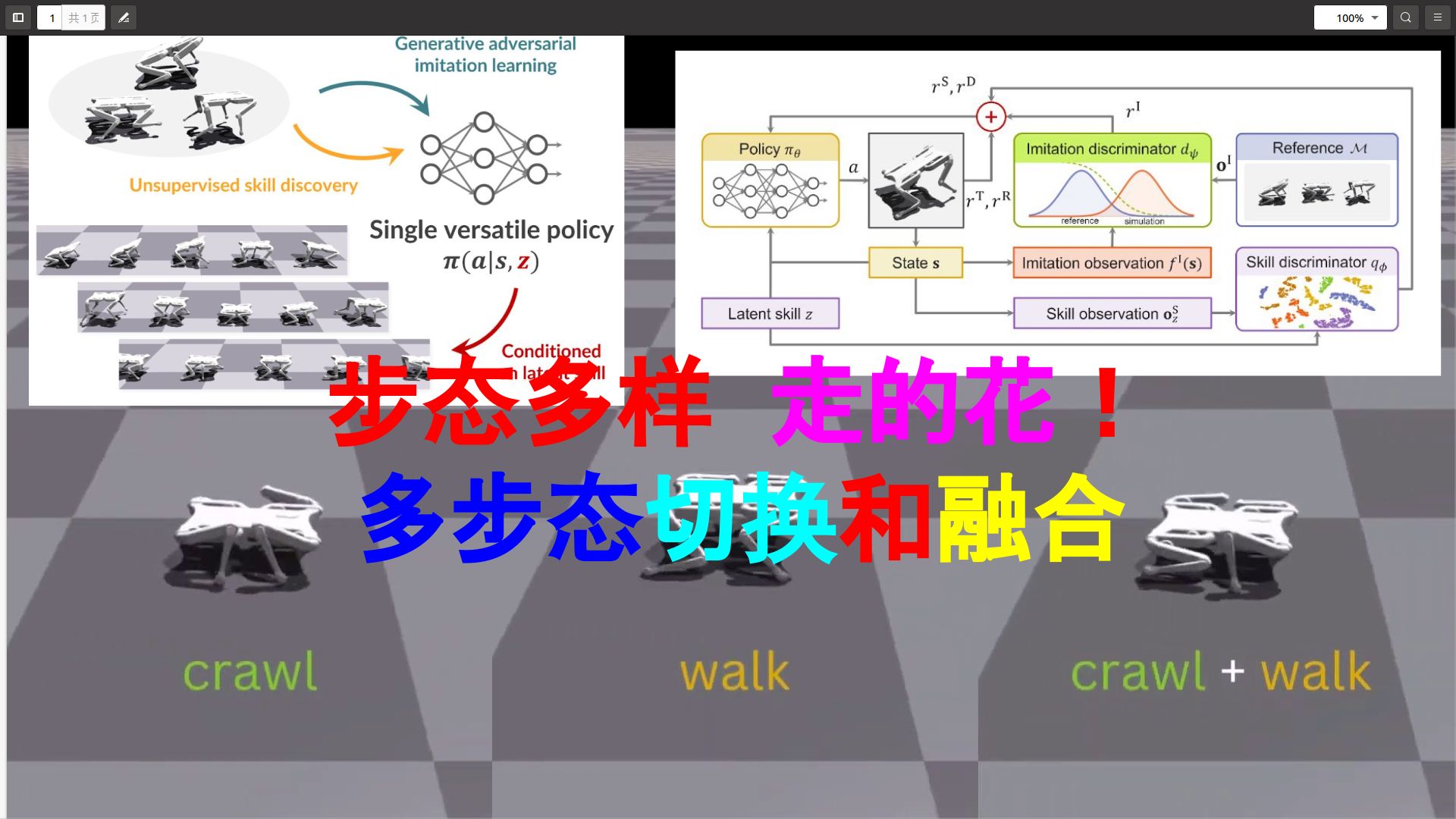
Versatile Skill Control via Self-supervised Adversarial Imitation
发布人
Versatile Skill Control via Self-supervised Adversarial Imitation of Unlabeled Mixed Motions Chenhao Li, Sebastian Blaes, Pavel Kolev, Marin Vlastelica, Jonas Frey, Georg Martius Learning diverse skills is one of the main challenges in robotics. To this end, imitation learning approaches have achieved impressive results. These methods require explicitly labeled datasets or assume consistent skill execution to enable learning and active control of individual behaviors, which limits their applicability. In this work, we propose a cooperative adversarial method for obtaining single versatile policies with controllable skill sets from unlabeled datasets containing diverse state transition patterns by maximizing their discriminability. Moreover, we show that by utilizing unsupervised skill discovery in the generative adversarial imitation learning framework, novel and useful skills emerge with successful task fulfillment. Finally, the obtained versatile policies are tested on an agile quadruped robot called Solo 8 and present faithful replications of diverse skills encoded in the demonstrations. code link https://github.com/martius-lab/cassi paper from https://sites.google.com/view/icra2023-cassi/home https://arxiv.org/abs/2209.07899 video from https://www.youtube.com/watch?v=kKY7UYhUTHI&list=PLhqs0Oka9VRHbHzDvoUkAzxe4-E71yN9g https://www.youtube.com/watch?v=7gejB2eb2fc&t=15s
打开封面
下载高清视频
观看高清视频
视频下载器
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
MPC and RL, two different roads to legged locomotion, and that's OK
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
最详细KAN环境搭建+代码复现,样例复现、拟合函数,草覆虫也能听懂!全新神经网络架构,真的让人醍醐灌顶!
[24 RA-L] 摆动速度超快!一种适合足式机器人快速摆动的腿部结构, 很巧妙!
通过优化理论指导设计双足以达到控制和任务的最优
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
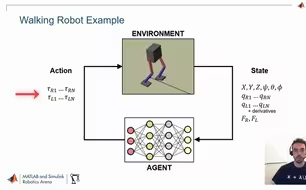
双足机器人步态生成 MATLAB and Simulink
Highly dynamic gaits controlled by a whole-body MPC
强推!上海交大、腾讯、中国科学院三方强强联合的【python+机器学习+深度学习】系列课程,堪称人工智能系列课程的巅峰之作!-人工智能/深度学习/机器学习
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
Control is dead ?control+ learning才是未来
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
[RLHF] 从 PPO rlhf 到 DPO,公式推导与原理分析
MuJoCo 仿真 案例欣赏
How to design nonlinear MPC with deep learning prediction model
人形机器人灵巧手臂最新成果
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
我在B站上大学!【完整版-麻省理工-微积分重点】全18讲!学数学不看的微积分课程,看完顺滑一整年。_人工智能数学基础/机器学习/微积分/麻省理工/高等数学
Safety-Critical Control of Autonomous Systems -Aaron Ames
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
同济大佬倾力打造!三小时带你掌握【强化学习】基础原理及环境配置搭建,小白也能轻松掌握的通俗课程!
AI大讲堂:敢叫transformer换新天!专业拆解【Mamba-2模型】
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
DTC: Deep Tracking Control 5
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
双足机器人的深度强化学习- MATLAB and Simulink
终于进国赛了,终于可以发了
Tailoring model complexity in MPC of legged locomotion
(ICRA 2024) Actor-Critic Model Predictive Control
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
我一直以为它是铁做的,没想到它是不锈钢做的,真是下血本啊