V
主页
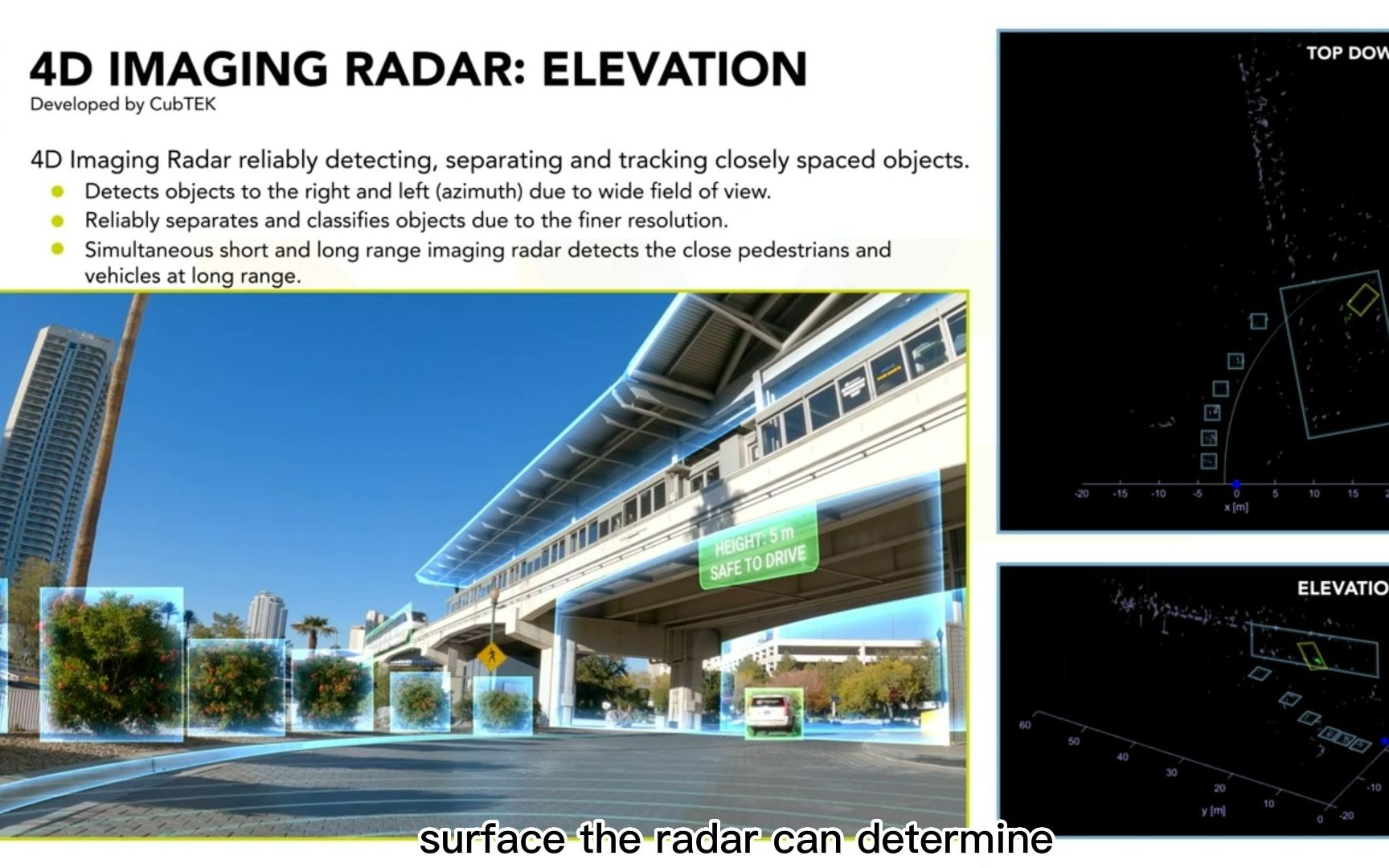
超越Lidar?聊一下4D Radar在自动驾驶中的优势和应用!
发布人
视频链接:https://www.youtube.com/watch?v=Al-0GgV4mV0 4D成像Radar将Radar的能力从探测大型物体扩展到通过提高环境地图和场景理解的高分辨率点云“看到”车辆环境。这些图像使车辆能够看到更多的行人,在繁忙的购物中心,并进一步看到在十字路口停车的车辆。
打开封面
下载高清视频
观看高清视频
视频下载器
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
超详细的激光雷达相机标定教程!(Lidar-Camera)
太详细了!多传感器融合的策略和方法
特斯拉的4D自动标注详解!为什么无标注数据work?
CVPR 2023:VoxelNeXt:用于3D目标检测和跟踪的全稀疏新框架!
毫米波雷达视觉算法CRAFT,这次彻底理解了!
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
激光雷达3D目标检测算法有哪些?怎么分类的?
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
多传感器标定的工具箱有哪些?
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
高精地图制作关键技术及领域主流方案分享-part1
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
使用YOLOv4完成激光雷达点云下的3D目标检测!
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
一文尽览:自动驾驶大语言模型应用综述分享
关于自动驾驶的一切(层级划分/Lidar/Radar/视觉感知/AI与发展等)
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
端到端自动驾驶:SparseDrive 算法详解
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
最近有哪些自动驾驶方向的github仓库值得star?
自动驾驶多传感器数据融合(1):什么是多传感器融合?
自动驾驶多传感器数据融合(3):单目标跟踪算法
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
KITTI SOTA!即插即用,单目3D检测中的单应性损失!(CVPR2022)
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
自动驾驶多传感器数据融合(4):多目标跟踪算法
多模态3D检测相关2D和3D感知基础知识
从0到1!彻底搞懂BEVFormer算法原理
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
SuperFusion:高精地图新基线
特斯拉的World Model是什么?怎么做端到端训练?
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
世界模型!特斯拉CVPR2023 Workshop!
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
使用概率深度补全的3D激光雷达重建(IROS2022)