V
主页
ECCV 2024 | 深度估计不死!DoubleTake:几何引导下的深度估计
发布人
项目主页:https://nianticlabs.github.io/doubletake/ 从序列RGB图像中估计深度是一项基本的计算机视觉任务,应用于增强现实、路径规划等。先前的工作通常利用多视图立体框架中的先前帧,依赖于局部邻域中的匹配纹理。相比之下,我们的模型通过向我们的网络提供最新的3D几何数据作为额外输入,利用了历史预测。这种自行生成的几何提示可以对关键帧未覆盖的场景区域的信息进行编码,与之前帧的单个预测深度图相比,它更具规则性。我们介绍了一种提示MLP,它将成本体积特征与先前几何体的提示相结合,从当前相机位置渲染为深度图,并测量先前几何体中的置信度。我们证明,我们的方法可以以交互速度运行,在离线、增量和重新访问评估场景中实现了最先进的深度估计和3D场景重建
打开封面
下载高清视频
观看高清视频
视频下载器
突发!上海爷叔被打!这待遇紧跟市场变化,为爷叔祈福吧!牙叔珍爱生命!
一文尽览:自动驾驶大语言模型应用综述分享
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
Nerf+SLAM会擦出什么样的火花?
AI整活:这你怎么睡得着的??
最新!如何使用深度强化学习在未知环境中进行导航?
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
现在的AI修复技术太强大了😱
【ICCV 2023】 Robust Depth:多种天气条件下的自监督单目深度估计新SOTA
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
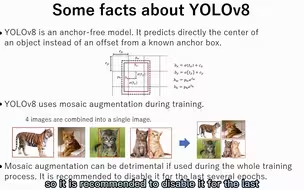
如何在ROS2中使用YOLOv8?
Hydra MDP | 英伟达如何理解端到端自动驾驶?
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
CVPR 2024 | 相机标定算法再升级!基于圆锥曲线的无偏估计~失真也好用!
ICML 2024 tutorial: 语言模型物理学
特斯拉的World Model是什么?怎么做端到端训练?
SurroundOcc:用于自动驾驶的多相机3D Occupancy预测
大火的BEVFusion算法详解
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
将SLAM推向全天候环境!CVPR'24:SubT-MRS Dataset
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
端到端自动驾驶离我们还有多远?Think Twice:CVPR 2023闭环新SOTA!
匈牙利跟欧盟又闹起来了
南洋理工大学博士分享!规模化可学习与交互式的自动驾驶决策系统如何构建?
搞懂了!原来激光雷达和相机的内外参是这样标定的
从0到1!彻底搞懂BEVFormer算法原理
ICLR'24无图新思路!LaneSegNet:基于车道分段感知的地图学习(实时推理+三项SOTA)
【ICCV 2023】 CORE:协作重建助力多智能体协同感知!
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
“慈父”斯大林早已看透犹太资本,伟人的决策不是一般人能看的透的,真正的伟人:马恩列斯毛
7月23日山西朔州卖瓜事件,三毛钱至于吗
SOTA!ECCV2022 | 实现精确的主动相机定位(Camera Localization)
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
祝小室友,今天开心的出院了!以后照顾好自己!加油!傅俊朗同学!相聚是我们的缘分
看看顶级大佬如何梳理L2++决策算法的演进-上
牛津大学CVPR2024 oral | MicKey:特征点检测方法,无需深度测量推断pose!
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
吹爆!这可能是导师都不讲的科研进阶课,不愧是国科大博士后!5小时就带我搞定了SCI论文写作!比啃书强太多!