V
主页
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
发布人
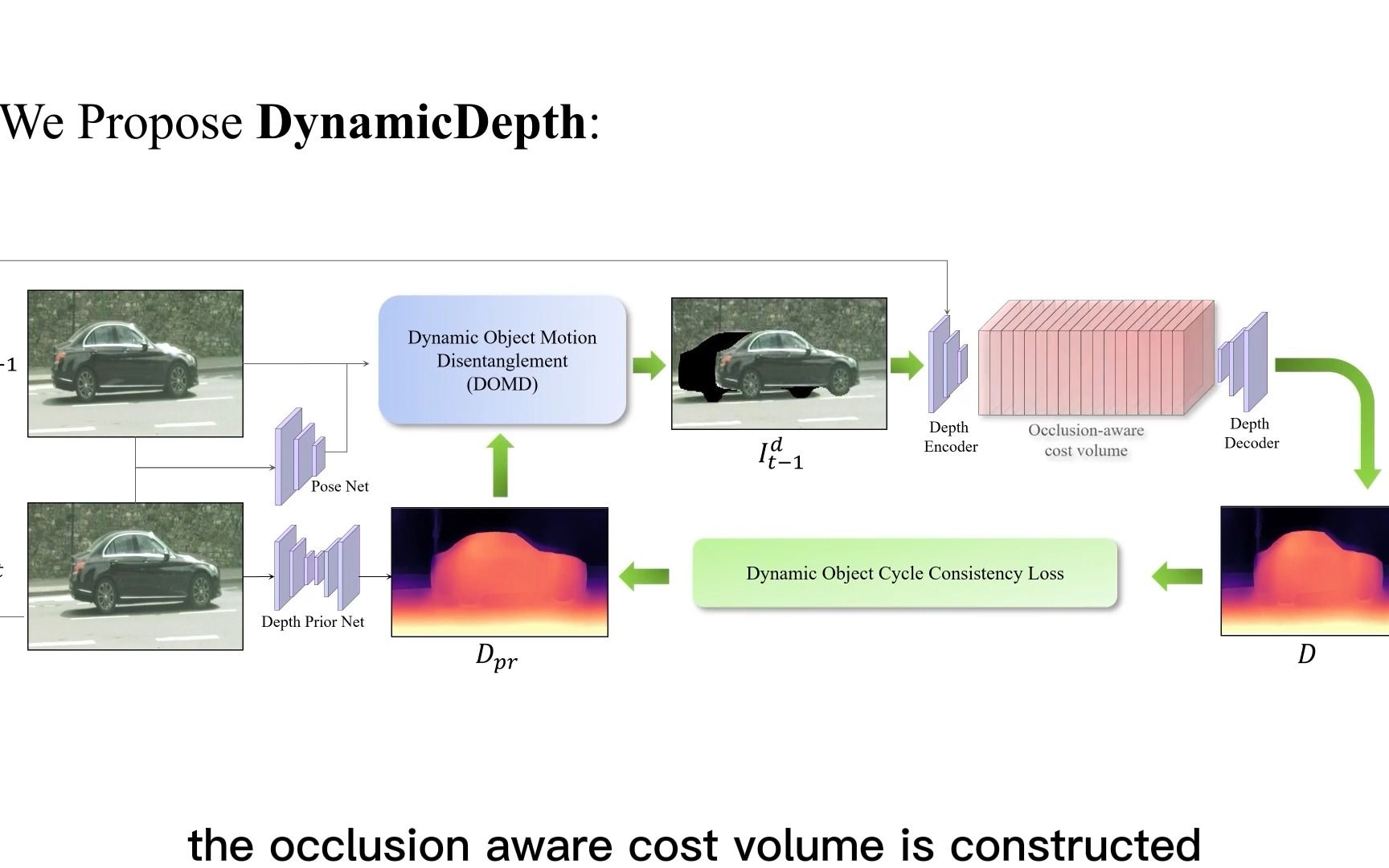
视频链接:https://www.youtube.com/watch?v=Gg6pLvFDdc4&ab_channel=ZiyueFeng 代码链接:https://github.com/AutoAILab/DynamicDepth 论文链接:https://arxiv.org/abs/2203.15174 传统的自监督单目深度预测方法基于静态环境假设,由于物体运动引入的不匹配和遮挡问题,导致动态场景中的精度下降。现有的以动态对象为中心的方法仅部分解决了训练损失级别的不匹配问题。在本文中,我们相应地提出了一种新的多帧单目深度预测方法来解决预测和监督损失级别的这些问题。我们的方法称为 DynamicDepth,是一种通过自监督循环一致学习方案训练的新框架。提出了一种动态对象运动解缠结(DOMD)模块来解开对象运动以解决不匹配问题。此外,新颖的遮挡感知成本体积和重投影损失旨在减轻物体运动的遮挡效应。对 Cityscapes 和 KITTI 数据集的广泛分析和实验表明,我们的方法明显优于最先进的单目深度预测方法,尤其是在动态对象领域。
打开封面
下载高清视频
观看高清视频
视频下载器
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
【ECCV 2022】清华大学&字节跳动提出 ParticleSfM:从单目视频中估计运动相机的位姿
ICRA2023 | 激光雷达相机内外参联合标定方案!
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
MonoPLFlowNet:用于单目图像的现实尺度 3D 场景流估计(ECCV2022)
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
Tesla惊艳的防碰撞机制是如何实现的?TESLA Occupancy Networks:Don’t Crash, EVER!!
视觉3D检测如何做自动标注?
【ECCV 2022】最佳论文奖!部分距离相关在深度学习中的多种应用
多传感器标定的工具箱有哪些?
【ECCV 2022】Google最新视觉主干MaxViT大放异彩:分类准确率再创新高
SOTA!ECCV2022 | 实现精确的主动相机定位(Camera Localization)
KITTI SOTA!即插即用,单目3D检测中的单应性损失!(CVPR2022)
ICCV 2023 | Point-SLAM:基于密集神经点云的SLAM!
ECCV2022 workshop | 自动驾驶中的自监督学习part2(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
速度和精度双SOTA! TPAMI 2022最新车道线检测算法(Ultra-Fast-Lane-Detection-V2)
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
关于自动驾驶的一切(层级划分/Lidar/Radar/视觉感知/AI与发展等)
什么是端到端自动驾驶?什么是基础world model?
爆火!DepthSplat:连接3DGS和深度估计!
ECCV2022 workshop | 自动驾驶中的自监督学习part1(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
特斯拉的World Model是什么?怎么做端到端训练?
轨迹预测到底预测个啥???轨迹预测入门必备!
多模态模型CLIP深度讲解
从0到1!彻底搞懂BEVFormer算法原理
香港科技大学最新!MARC:自动驾驶的多极和风险意识应急计划
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
(超爽中英!) 2024公认最好的【Agent智能体】系列教程!带你从0到1构建自己的智能体!
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
透彻!特斯拉occupancy network详解
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
18.4M参数,实现SOTA!EFFOcc:一个基于高效融合的三维占用网络的最小基线(清华大学最新)