V
主页
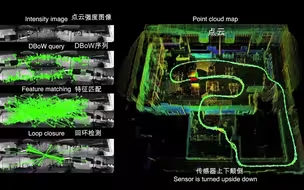
SLIM:自监督激光雷达场景流和运动分割
发布人
SLIM: Self-Supervised LiDAR Scene Flow and Motion Segmentation SLIM:自监督激光雷达场景流和运动分割
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶实战课之多相机间的同步实战
激光雷达在高精地图中的应用
ECCV2022 SQN:大规模3D点云的弱监督语义分割
K-Lane 大规模激光雷达车道检测数据集和基准
自动驾驶中多个小视场固态激光雷达不依赖参照物的外参标定(代码即将开源)
无需额外训练!SAMPro3D:零样本3D分割一切!
最新ICRA2021论文,基于成像激光雷达的稳健位置识别,代码开源!
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
透彻剖析室内外激光SLAM算法与实战系列课程-室内激光SLAM建图定位实战
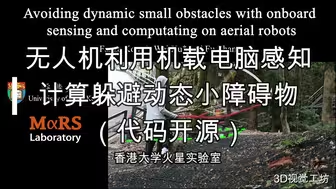
香港大学火星实验室:无人机利用机载电脑感知计算躲避动态障碍物
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
香港理工大学最新工作:基于激光雷达的实时定位及网格划分
实测L4无人驾驶:硬件还是激光雷达和摄像头 但智己的算法从“逻辑”进化到了“直觉”
IROS2020,基于航空影像的自动驾驶汽车激光雷达定位
缺陷检测—练习1:基于直方图统计的图像分割
最新CVPR2020工作:OccuSeg:感知占用的3D语义分割
TRO 2023 适用于高分辨率雷达的非光线投射占用栅格建图
CVPR2022 并非所有点都相等:学习3D激光雷达点云的高效点基探测器
FreeScan Combo 手持扫描仪-05.扫描模式-激光扫描
大作业|激光-视觉-IMU-GPS融合SLAM算法
单目无监督深度估计综述
NASA JPL团队CoSTAR一大力作:直接激光雷达里程计利用密集点云快速定位
自动驾驶中的视觉感知技术
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
基于大规模公路环境的鲁棒激光惯性里程计与建图方法
香港大学工作,FAST-LIO:基于紧密耦合迭代卡尔曼滤波的快速、鲁棒的激光雷达里程计包,代码开源
Transformer模型结构
清华最新开源万能3D分割一切!
四旋翼模型简介-御风250模型
自动驾驶中实战课之Lidar与IMU的同步实战
自动驾驶中实战基础之点云去畸变与对齐
高通提出无监督和跨单元部署的实时、准确、一致的视频语义分割
Occupancy占用网络的多维应用探究
最新英伟达自动驾驶测试demo,包含距离感知、交通标志检测、运动估计、多相机特征跟踪、以及停车位检测等多项功能
ICCV 2023开源 最新跟踪一切!分割一切视频版来了!
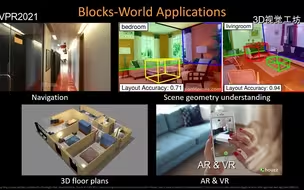
CVPR2021,结构光低计算成本准确恢复分段平面场景
南洋理工大学开源F-LOAM:最为精确和快速的开源激光SLAM方案之一
GRAM: 面向3D感知图像生成的生成式辐射流形