V
主页
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第3节:车路协同场景激光雷达部署策略优化方法
发布人
【自动驾驶之心AI Day】第3节:自动驾驶传感器部署策略优化方法——车路协同场景激光雷达部署策略优化方法
打开封面
下载高清视频
观看高清视频
视频下载器
超详细的激光雷达相机标定教程!(Lidar-Camera)
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
ICRA2023 | 激光雷达相机内外参联合标定方案!
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
激光雷达3D目标检测算法有哪些?怎么分类的?
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
搞懂了!原来激光雷达和相机的内外参是这样标定的
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
实战超详细!Radar、Lidar和前置Camera的标定
Nvidia强大的神经重建引擎:场景重建和事件注入(Neural Reconstruction Engine,NRE)
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
使用YOLOv4完成激光雷达点云下的3D目标检测!
【CVPR 2024】鉴智机器人算法大佬揭秘3D场景流估计的最新工作——3DSFlabelling
ICRA2021 | 多相机激光雷达的外参标定(基于目标姿态估计)
【自动驾驶实践】多激光雷达实车安装&外参标定&拼接预处理
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
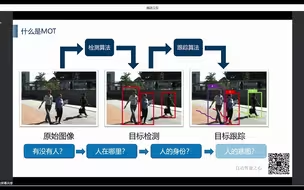
多目标跟踪世界冠军和大家一起聊聊MOT的模块与优化方向!
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
LiDAR-Camera多传感器融合!StradVision X VUERON Technology
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
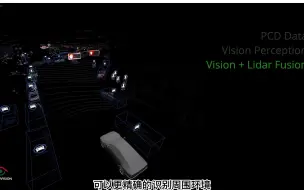
多传感器融合!BEV感知融合算法介绍
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
端到端趋势下,传统规控还有未来么?
ICCV 2023 | NeO 360: 用于户外场景稀疏视图合成的神经场
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
多传感器标定的工具箱有哪些?