V
主页
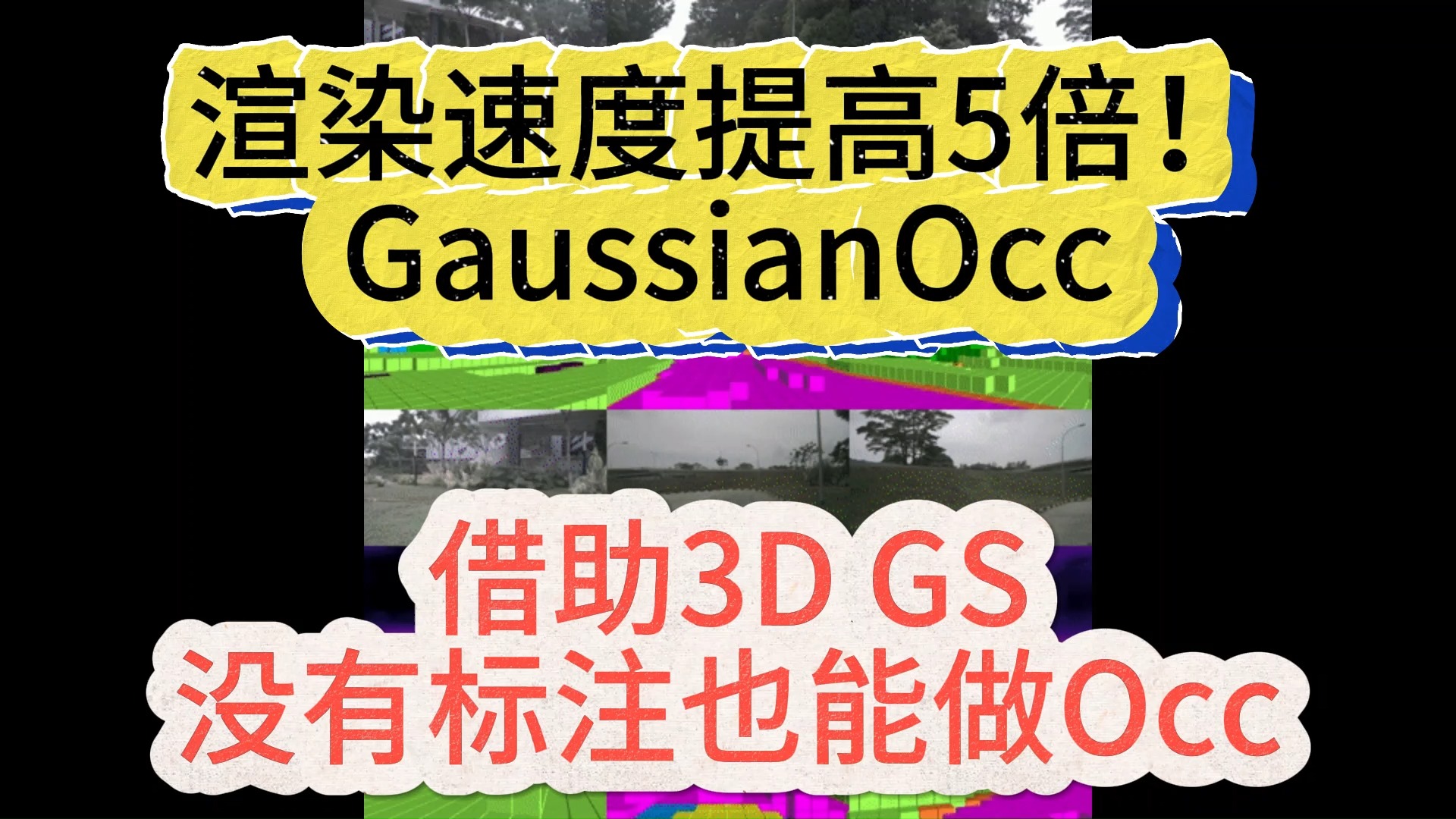
渲染速度提高5倍!GaussianOcc:借助3D GS,没有标注也能做Occ(东京大学)
发布人
渲染速度提高5倍!GaussianOcc:借助3D GS,没有标注也能做Occ(东京大学) 论文链接:https://arxiv.org/pdf/2408.11447, 项目链接:https://github.com/GANWANSHUI/GaussianOcc GaussianOcc是一种系统方法,它研究了Gaussian Splatting的两种用途,用于在环视图中实现完全自监督且高效的3D占用率估计。首先,传统的自监督3D占用率估计方法在训练过程中仍然需要来自传感器的真实6D姿态。为了克服这一限制,这里提出了用于投影的Gaussian Splatting(GSP)模块,以通过相邻视图投影为完全自监督训练提供准确的尺度信息。此外,现有方法依赖于volume渲染,利用2D信号(深度图、语义图)进行最终的3D体素表示学习,这既耗时又低效。这里提出了来自体素空间的Gaussian Splatting(GSV),以利用Gaussian Splatting的快速渲染特性。因此,所提出的GaussianOcc方法能够以具有竞争力的性能实现完全自监督(无需真实姿态)的3D占用率估计,同时计算成本较低(训练速度提高2.7倍,渲染速度提高5倍)
打开封面
下载高清视频
观看高清视频
视频下载器
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
视觉3D检测如何做自动标注?
速度提高60倍!重建你的自动驾驶场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)
透彻!特斯拉occupancy network详解
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
端到端算法是什么?自动驾驶领域是怎么做的?
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
端到端趋势下,传统规控还有未来么?
特斯拉的4D自动标注详解!为什么无标注数据work?
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
分类突破!自动驾驶中的Occupancy感知方法分类
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
端到端算法有哪些优势?完爆传统感知规控?
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
什么是端到端自动驾驶?什么是基础world model?
【IROS 2022】超大规模环视鱼眼数据集!SynWoodScape:8万张图像,十多个任务标注(检测/分割/深度/光流/事件等)
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
ICCV2023 | MPOT:多平面目标跟踪
端到端基础!绕不开的感知模块
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
360 视频高效生成可自由移动 3D 场景 (Gaussian Splatting)
自动驾驶中的多传感器融合状态估计如何建模?
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
一文尽览:自动驾驶大语言模型应用综述分享
英伟达最新!SCube:仅用三张图,就能实现即时大规模三维场景重建
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建