V
主页
精迅V1 | 科研级单目双目高精度3D结构光扫描仪
发布人
精迅V1 | 科研级单目双目高精度3D结构光扫描仪 硬件源码提供的功能,包含如下: 硬件控制:完整的相机和投影仪的控制功能 相机:设置曝光时间、拍照 投影仪:写入图案、投影图案、同步触发相机拍照 算法模块:整套结构光技术的相关算法 相移条纹:相移法+互补格雷码的条纹生成、解码程序 单目重建:标定、重建、畸变校正、点云显示 双目重建:标定、重建、畸变校正、点云显示 Gamma:Gamma校正程序,有效地降低非线性误差 HDR算法:多重曝光HDR算法,有效应对高反光重建场景
打开封面
下载高清视频
观看高清视频
视频下载器
高速结构光三维面形测量方法
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
单目无监督深度估计综述
四旋翼模型简介-御风250模型
双目相机标定基础及标定实战
PID控制器原理讲解
传感器与遥控器校准原理
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
LVI-SAM代码实战与评估
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
四旋翼无人机-PX4控制算法原理
四元数基础
绪论|单目相机标定理论及张正友标定法(上篇)
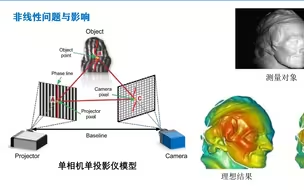
结构光的非线性问题与校正
单目深度估计|连续帧方法实战课
单目深度估计-动态物体处理方法
四旋翼无人机-SO3姿态控制原理
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
LVI-SAM|视觉-惯性子系统(VIS)代码精读
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
四旋翼无人机-PX4控制算法代码
如何轻松拿捏LIO-SAM-数学基础篇
单目深度估计绪论
四旋翼模型与控制基础
ECCV'24开源 | 拳打ORB3脚踢DROID!强化学习+VO=精度暴涨19%!
深度相机概述
四旋翼无人机-TD跟踪微分器原理与仿真
国内首个面向具身智能方向的理论与实战系统课程
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
Occupancy的工程细节
Occupancy占用网络的多维应用探究
清华最新开源MARS!第一个基于NeRF的自动驾驶开源模拟器!
如何进行三维重建?从单帧深度估计到完整模型重建
[非完整版]基于结构光投影三维重建技术系列课程-绪论
中科院新作!即插即用的meshing模块!精确构建无动态mesh地图,还能纠正里程计!
北交博士主讲:深度学习驱动下的相机标定技术发展(上篇)
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
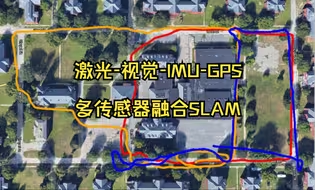
大作业|激光-视觉-IMU-GPS融合SLAM算法
这绝对是质量最高的单目深度估计开源方案!
光学3D测量技术原理及应用