V
主页
【CAC2020Workshop】张雪波——面向地面移动机器人路径规划的自主空中探索
发布人
张雪波,教授,博导,现任南开大学人工智能学院智能科学系系主任,天津市智能机器人技术重点实验室副主任。主要研究兴趣为机器人视觉感知、运动规划以及智能控制。针对灾后搜索与救援活动,如何快速到达救援地点是个关键问题。然而现有的方法大多需要对整个环境进行穷尽探索,导致救援行动低效。本研究提出一种面向地面移动机器人路径规划的空中机器人自主探索策略。该方法利用空中机器人的灵活机动特性以及视野优势,为地面移动机器人构建可通行地图,并结合frontier-based的自主探索策略,为地面机器人寻找可行路径。
打开封面
下载高清视频
观看高清视频
视频下载器
【空中机器人】南开大学张雪波:旋翼无人机视觉伺服
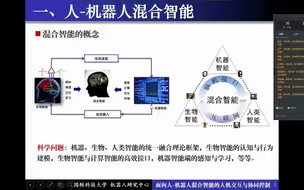
【CAC2020Workshop】郑志强——面向人-机器人混合智能的人机交互与协同控制
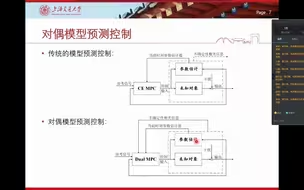
【CAC2020Workshop】李少远、曹文祺——《具有可参数不确定性系统的对偶自适应模型预测控制》
尴尬?套套掉在里面了应该怎么办?
【空中机器人】中国科学院沈阳自动化研究所杨丽英:旋翼无人机技术系统与应用
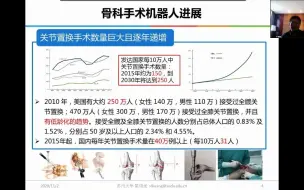
【CAA云讲座】苏州大学教授匡绍龙——关节置换手术机器人的人机协同控制
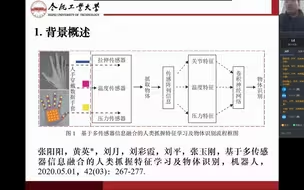
【CAA云讲座】合肥工业大学副教授刘平——可拉伸柔性力学传感器件:材料、结构与工艺
【CAA云讲座】苏州大学机器人与微系统研究中心副教授金国庆:面向软体机器人的3D打印介绍
中国自动化学会奖励体系
【CAA云讲座】郭朝-柔性康复外骨骼机器人的驱动、设计与控制
【CAA云讲座】上海理工大学孟巧玲《基于SMA智能复合结构的柔性外骨骼机器人的研究进展与思考》
【CAA云讲座】冯美-辅助胸腹腔微创手术的新型机器人系统
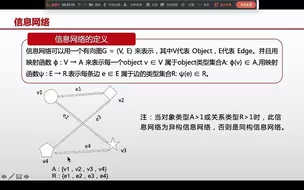
【CAC2020Workshop】陈琪美——异构信息网络技术
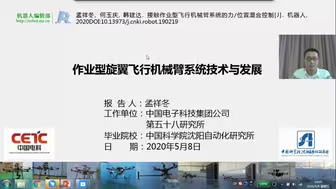
【空中机器人】孟祥冬(中国电子科技集团公司第五十八研究所):作业型旋翼飞行机械臂系统技术与发展
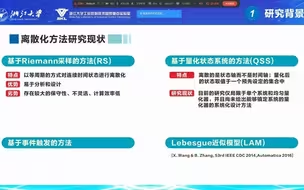
【CAC2020Workshop】吴争光——分布式连续非线性系统的异步勒贝格模型
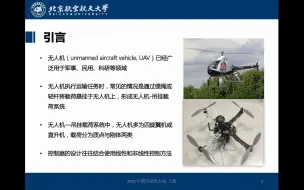
【CAC2020Workshop】诸兵——四旋翼无人机—吊挂载荷系统建模与控制综述
【CAA云讲座】电子科技大学程洪 《智能康复机器人进展与趋势》
【CAA云讲座】中科院沈阳自动化所曾鹏:面向工业互联网的边缘计算技术和应用实践
河海大学孙洪广:复杂介质中污染物迁移扩散过程的分数阶导数建模
【CAA科普大讲堂】浙江大学教授许超:智能自主系统 - 从单体向集群演进”
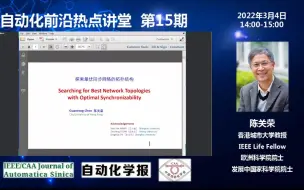
【自动化前沿热点讲堂第15期】香港城市大学陈关荣教授:探索最优同步网络的拓扑结构
【CAA云讲座】湖南大学缪志强副教授:受限条件下多自主机器人系统协同控制
【CAA云讲座】北京航空航天大学王君臣——经尿道电切镜手术机器人
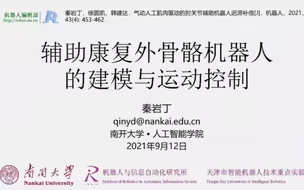
【CAA云讲座】南开大学秦岩丁《辅助康复外骨骼机器人的建模与运动控制》
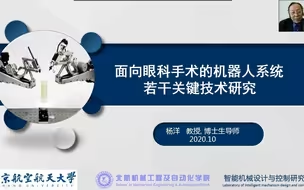
【CAA云讲座】北京航空航天大学教授杨洋:面向眼科手术机器人的若干关键技术研究
【CAA YES】中国自动化学会青年菁英论坛:信息物理系统先进控制理论
【CAA云讲座】意大利技术研究院(IIT)博士后李高峰:基于视觉反馈的机器人无模型运动控制框架
【CAA云讲座】中科院自动化所王卫群:基于生机电融合的康复机器人关键技术
【会士面对面】华南理工大学邓飞其教授——随机系统控制:于不确定环境中实现确定目标
【CAA云讲座】沈阳工业大学孙平《医疗服务机器人运动控制关键技术》
【我和优博有个约会】东北大学安立伟副教授:科研经历分享与学术感悟
【CAA云讲座】首都师范大学信息工程学院邵振洲——基于无监督深度学习的多模态手术轨迹快速分割
【CAA云讲座】南方科技大学 张明明:《基于任务表现的机器人自适应康复控制策略研究》
【CAA云讲座】哈尔滨工业大学副教授博导樊继壮:仿蛙软体机器人研究
【CAA会士面对面】重庆大学宋永端教授:关于PID控制的通用普适及可靠可解释性
【CAA云讲座】中国科学技术大学和美国佐治亚理工学院联合培养博士陈现敏:基于模型设计开发机器人电控系统与项目案例分享
【会士面对面】清华大学周彤教授:大规模网络化系统基本特性分析及其延伸
【全200集】【儿童物理科普纪录片】孩子必看的机械科普纪录片!
新一代工业移动机器人规模化应用的软件挑战与发展——熊蓉
【CAA云讲座】中南大学谢世文副教授:级联有色冶金过程建模、协调优化和控制