V
主页
【CAA云讲座】湖南大学缪志强副教授:受限条件下多自主机器人系统协同控制
发布人
随着执行任务越来越复杂,机器人从个体自主向群体协同发展。协同控制技术是多机器人系统完成各种复杂任务的基础。已有的经典协同控制系统设计中往往需要假定机器人之间可以直接相互通信,而且自身状态信息是全部可测量的。然而在实际应用中,受外界环境和机器人自身能力的限制,导致机器人的感知/通信能力是有限的。因此,研究受限条件下的多自主机器人系统协同控制问题具有重要意义。本报告主要介绍两类受限条件下的协同控制方法:视觉反馈控制和无速度反馈控制。最后,对多机器人协同控制系统的未来研究方向和发展趋势进行了展望。
打开封面
下载高清视频
观看高清视频
视频下载器
【CAA云讲座】东北大学教授杨光红——多智能体系统的避碰协同:从底层闭环控制到上层指令调节
【CAA云讲座】中科院自动化所蒲志强教授:知识与数据协同驱动的群智决策研究与实践
【会士面对面】华南理工大学邓飞其教授——随机系统控制:于不确定环境中实现确定目标
东南大学李世华教授:机电系统抗干扰模型预测控制研究
【CAA云讲座】华东师范大学李韬教授:面向能源互联网能量管理的分布式协同算法
【CAA云讲座】浙江大学杨巍《基于运动预测的髋关节外骨骼实时助力控制》
【CAA云讲座】大界机器人首席科学家周诚喆:工业机器人的柔性智能
挑战场景下无人系统的自主感知,拓扑优化与协同控制——方浩
【CAA云讲座】中国科学院沈阳自动化研究所研究员赵新刚:智能医疗康复机器人技术
【CAA会士面对面】重庆大学宋永端教授:关于PID控制的通用普适及可靠可解释性
【CAA云讲座】郭朝-柔性康复外骨骼机器人的驱动、设计与控制
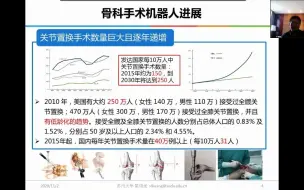
【CAA云讲座】电子科技大学程洪 《智能康复机器人进展与趋势》
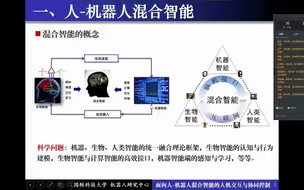
【CAC2020Workshop】郑志强——面向人-机器人混合智能的人机交互与协同控制
【CAA科普大讲堂】浙江大学教授许超:智能自主系统 - 从单体向集群演进”
【CAA云讲座】华中科技大学伍冬睿教授:精准、安全、隐私保护的脑机接口
西安电子科技大学副教授夏小芳:智能电网大数据分析及应用挑战-以窃电检测为例
【CAA云讲座】“中国青年五四奖章”获得者、昆明理工大学那靖教授——基于参数估计误差的自适应控制:理论及应用
南京航空航天大学张柯:多智能体系统故障诊断与容错控制
【CAA云讲座】南开大学秦岩丁《辅助康复外骨骼机器人的建模与运动控制》
【CAA云讲座】哈尔滨工业大学副教授博导樊继壮:仿蛙软体机器人研究
【CAA云讲座】清华大学自动化系长聘教授耿华: 新能源集群控制与优化
【CAA云讲座】苏州大学教授匡绍龙——关节置换手术机器人的人机协同控制
【CAA云讲座】意大利技术研究院(IIT)博士后李高峰:基于视觉反馈的机器人无模型运动控制框架
【CAC2020Workshop】张雪波——面向地面移动机器人路径规划的自主空中探索
【我和优博有个约会】东北大学安立伟副教授:科研经历分享与学术感悟
【CAA云讲座】北京度量科技有限公司:简介几种集群协同控制实验平台
【CAA云讲座】广东工业大学机电学院教授管贻生:仿生软体攀爬机器人的建模分析与实验
【CAA云讲座】日本大阪大学长聘副教授万伟伟:智能机器人时代的自动化与系统集成
【CAA云讲座】南京航空航天大学硕士生导师吴青聪——康复机器人设计与控制
东北大学刘腾飞:非线性系统的量化控制
西安交通大学助理教授曹晔:非线性系统高性能控制研究进展
【CAA YES】中国自动化学会青年菁英论坛:信息物理系统先进控制理论
【CAA云讲座】中南大学袁小锋副教授:基于深度学习的炼油生产过程数据建模研究
中国科学院自动化研究所研究员蒲志强:基于博弈对抗的足球推演技术
【CAA云讲座】北京理工大学曾宪琳副教授:多智能体系统的分布式非光滑优化与矩阵计算
【CAA云讲座】冯美-辅助胸腹腔微创手术的新型机器人系统
【CAA云讲座】重庆邮电大学蒋建春教授:车路协同系统关键技术与应用
【CAA云讲座】中国科学院沈阳自动化研究所宋国立《手术机器人关键技术》
清华大学助理研究员余金城:资源受限下多智能体协同环境探索方法
赵世珏:多机器人队形控制——从理论到实践