V
主页
BLOW~Big OCean
发布人
Kpopz.net
打开封面
下载高清视频
观看高清视频
视频下载器
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
CVPR2022 | MeMOT:具有记忆的多目标跟踪
自动驾驶中的激光雷达点云分割-part2
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
RangeDet:基于Range-View的激光雷达3D目标检测网络(ICCV2021)
无监督域适应3D检测SOTA!让激光雷达奔跑起来~
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
太详细了!多传感器融合的策略和方法
速度和精度双SOTA! TPAMI 2022最新车道线检测算法(Ultra-Fast-Lane-Detection-V2)
实时3D目标检测 | 利用稀疏表示来提高嵌入式系统上3D目标检测模型的运行速度!
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
使用 YOLOv8+双目立体匹配,实现目标检测与测距
超详细的激光雷达相机标定教程!(Lidar-Camera)
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
详解!基于Camera和基于激光雷达的自动驾驶系统区别!
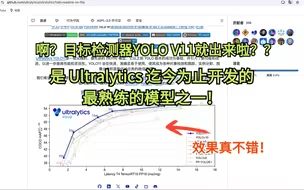
一颗CV视觉AI领域的重磅炸弹!仅更改一行代码就让YOLOV11成为了最成熟、效果最好的目标检测模型!
CVPR2024 | 逆天了!一统所有目标感知任务,目标感知基础模型GLEE
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
使用概率深度补全的3D激光雷达重建(IROS2022)
多传感器融合!BEV感知融合算法介绍
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
ParkingE2E:纯视觉端到端泊车网络(秦通团队出品)
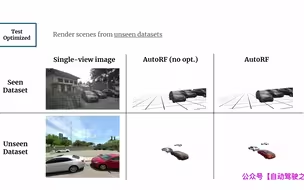
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
BEV-SAN:通过切片注意力网络实现精确的BEV 3D检测
激光雷达卖疯,特斯拉纯视觉错了?
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
自动驾驶多传感器数据融合(4):多目标跟踪算法
YOLOv8+双目立体匹配,实时观测微小动物三维运动轨迹!
端到端算法有哪些优势?完爆传统感知规控?
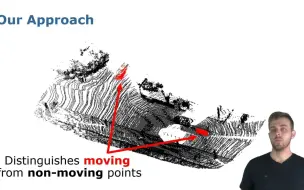
SemanticKITTI SOTA!激光雷达数据中的运动目标分割(IROS2022)
Nuscenes、KITTI等多个BEV开源数据集介绍!
从0到1!彻底搞懂BEVFormer算法原理
世界模型!特斯拉CVPR2023 Workshop!
点云地图中的重定位
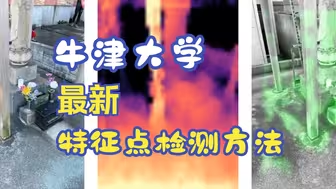
牛津大学CVPR2024 oral | MicKey:特征点检测方法,无需深度测量推断pose!
YOLOv11+双目立体匹配融合,进行实例分割、测距和点云重建!
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)