V
主页
多传感器标定OpenCalib工具箱介绍!
发布人
国内首个多传感器标定系统教程,针对相机内参标定、标定精度优化、传感器到车体标定、Lidar/Radar/IMU/Camera多传感器之间离线标定/在线标定、鱼眼与环视相机标定等20+标定方案展开了详细算法讲解与代码实现,适合感知、标定等算法工程人员从0到1的学习!学习链接:https://gsf.xet.tech/s/dpYnP,小助理微信AIDriver004
打开封面
下载高清视频
观看高清视频
视频下载器
多传感器标定的工具箱有哪些?
搞懂了!原来激光雷达和相机的内外参是这样标定的
实战超详细!Radar、Lidar和前置Camera的标定
太详细了!多传感器融合的策略和方法
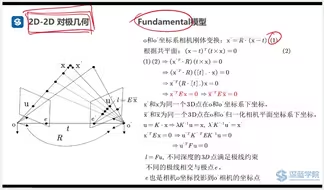
ICRA2023 | 激光雷达相机内外参联合标定方案!
支持在线时空标定!高效多传感器辅助惯性导航系统(ICRA2021)
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
大火的BEVFusion算法详解
【IROS 2022】多模态SLAM框架MIMOSA:一种针对传感器退化的弹性自治多模态SLAM框架
自动驾驶多传感器数据融合(1):什么是多传感器融合?
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
高精地图制作关键技术及领域主流方案分享-part1
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
自动驾驶中的多传感器融合状态估计如何建模?
超越Lidar?聊一下4D Radar在自动驾驶中的优势和应用!
视觉SLAM VIO开源代码解析
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
冠军方案!SoccerNet相机标定挑战的第一名解决方案(CVPR2023)
多传感器融合!BEV感知融合算法介绍
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
Nerf+SLAM会擦出什么样的火花?
多模态3D检测相关2D和3D感知基础知识
自动驾驶入门技术全栈实战解析-1-感知篇
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
LiDAR-Camera多传感器融合!StradVision X VUERON Technology
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
特斯拉的World Model是什么?怎么做端到端训练?
毫米波雷达视觉算法CRAFT,这次彻底理解了!
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
【深信科创联合制作】仿真数据的一百种玩法 | 基于Carla传感器的仿真数据增强实战来了!