V
主页
CVPR 2023 | 单一图像深度预测的改进:一个多变量的高斯方案
发布人
Authors: Ce Liu, Suryansh Kumar, Shuhang Gu, Radu Timofte, Luc Van Gool. 论文:https://arxiv.org/pdf/2303.18164.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
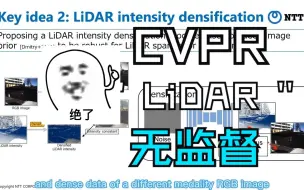
CVPR 2023 | 使用LiDAR强度的无监督内在图像分解
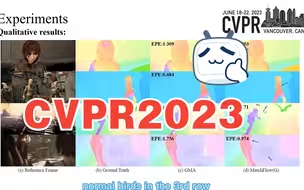
CVPR 2023 | 从几何匹配一致的角度重新思考光流问题
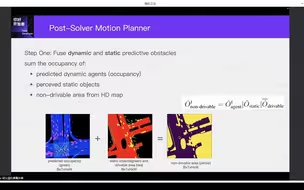
端到端自动驾驶离我们还有多远?Think Twice:CVPR 2023闭环新SOTA!
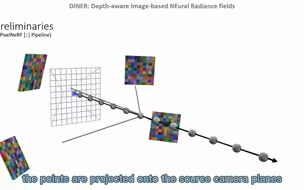
CVPR 2023 | DINER: 基于深度感知图像的神经辐射场
CVPR 2023最新!基于NeRF监督的深度立体视觉
StradVision - 语义分割和深度图预测demo
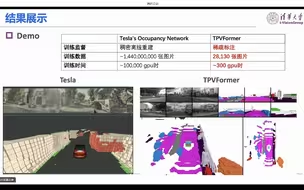
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
CVPR 2023 | 通过点云预测作为4D Occupancy 预测的代理
深度学习CVPR 2023 | 图像去模糊 | 基于频域的Transformer
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
CVPR 2023 | Mask DINO:面向检测和分割的统一Transformer最强框架!
冠军!英伟达荣获CVPR端到端自动驾驶挑战赛第一名
CVPR2022 | MeMOT:具有记忆的多目标跟踪
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
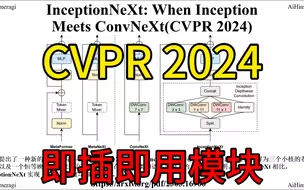
深度学习CVPR 2024 | InceptionNeXt | 即插即用模块
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
CVPR2025的25篇文章限投规定,大家怎么看?合理,不合理还是如理?
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
CVPR 2023 | INSTA: 实时3D头像重建
CVPR2023:Wamyo挑战赛分享(轨迹预测/分割/姿态估计/运动预测)
自动驾驶中的多传感器融合状态估计如何建模?
CVPR 2023 | 协同感知在真实世界就不能打了?V2V4Real告诉你很能打!世界首款V2V协同感知数据集
深度学习CVPR 2024 | 轻量高效ViT | SHViT
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
耗时三周整理【CVPR2024】可复现论文合集!整理了9个大方向,78篇论文!为你提供新的研究方向、启发论文创新点!-CVPR论文、SCI论文、顶会
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
车道线检测的未来是MapFree吗?面向可量产方案总结
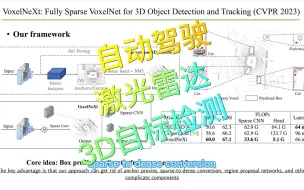
CVPR 2023:VoxelNeXt:用于3D目标检测和跟踪的全稀疏新框架!
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
ICCV 2023 | CVRecon:重新思考神经重建中三维几何特征学习
【WACV2023】即插即用!频率感知自监督深度估计SOTA!
代码讲解| StarConv 捕获高维非线性特征 微软开源 CVPR 2024 注意力机制平替方案!【V1代码讲解011】
端到端算法有哪些优势?完爆传统感知规控?
深度学习 | CV任务通用 | YOLO | CVPR2024 | IDC大核分解卷积和INB轻量高效即插即用模块,适用于目标检测,图像分类,实例分割,语义分割
多传感器标定的工具箱有哪些?
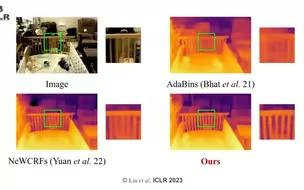
ICLR 2023 |VA-DepthNet:单目图像深度预测的变分方法
从0到1!彻底搞懂BEVFormer算法原理