V
主页
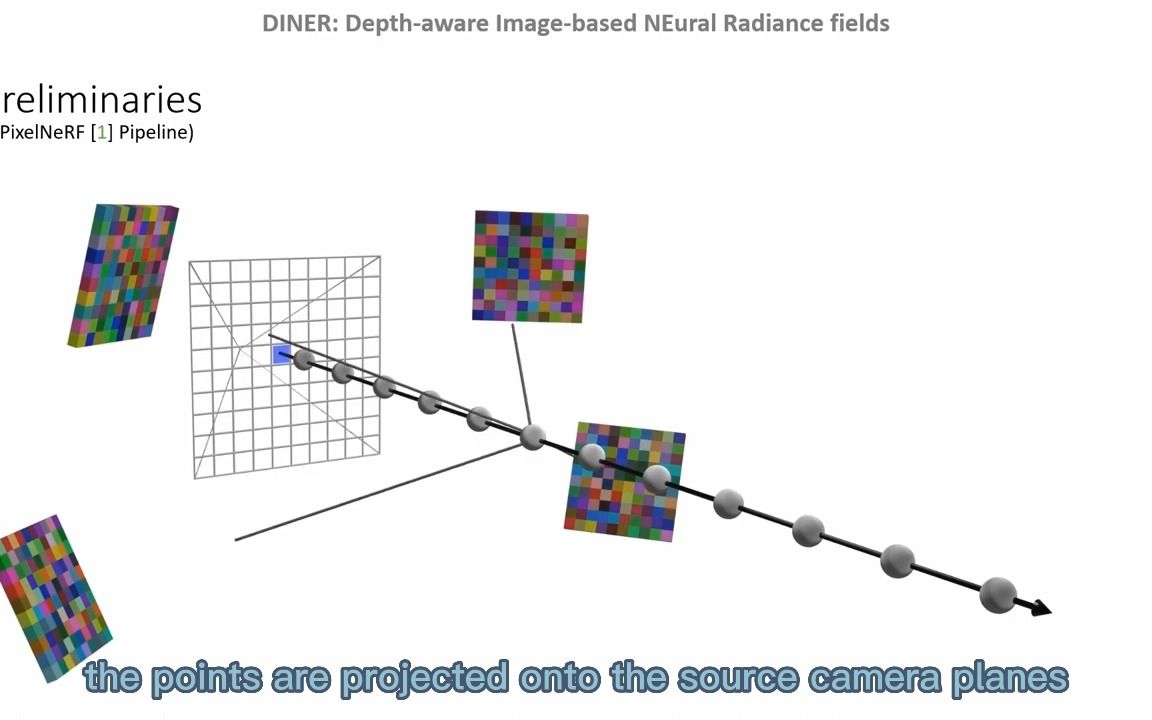
CVPR 2023 | DINER: 基于深度感知图像的神经辐射场
发布人
本文提出了深度感知的基于图像的神经辐射场(DINER)。给定RGB输入视图的稀疏集合,本文预测深度和特征图以指导体积场景表示的重建,该体积场景表示允许本文在新视图下渲染3D对象。具体地说,本文提出了新的技术,将深度信息纳入特征融合和有效的场景采样。与现有技术相比,DINER实现了更高的合成质量,并且可以处理具有更大视差的输入视图。
打开封面
下载高清视频
观看高清视频
视频下载器
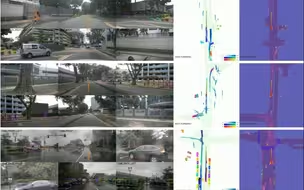
为自动驾驶构建城市规模的神经辐射场
CVPR 2023最新!基于NeRF监督的深度立体视觉
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
CVPR 2023 | INSTA: 实时3D头像重建
CVPR2023 | 利用神经辐射场提升全景三维场景理解的能力
世界模型!特斯拉CVPR2023 Workshop!
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
CVPR 2023 | 从几何匹配一致的角度重新思考光流问题
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
ICCV 2023 | NeO 360: 用于户外场景稀疏视图合成的神经场
来听大牛说!赵行老师在CVPR 2023年自动驾驶研讨会上发表的演讲
机器人神经场的全面综述:详细介绍 其在姿势估计 操控,导航,物理和自动驾驶中的应用 ,潜力,挑战
ECCV'24 | FPV-NeRF,Meta的新视图合成方法,为无人机空间感知带来革命性提升
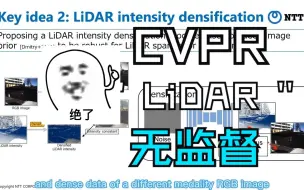
CVPR 2023 | 使用LiDAR强度的无监督内在图像分解
DeepLSD: 基于深度图像梯度的线段检测与细化
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
ECCV'24 | Gaussian Grouping解决3DGS的对象级场景理解问题,实现3D场景任意分割和编辑
【WACV2023】即插即用!频率感知自监督深度估计SOTA!
CVPR 2023 | OrienterNet:基于神经匹配的2D公共地图视觉定位
【ICCV 2023】 CORE:协作重建助力多智能体协同感知!
神经辐射场(NeRF)在学术界被替代?为何说3D高斯才是未来大势?附9篇必读论文和源码
3DShape2VecSet:神经场和生成扩散模型的3D形状表示
冠军方案!SoccerNet相机标定挑战的第一名解决方案(CVPR2023)
ICCV 2023 | CLNeRF:持续学习遇到NeRF
CVPR 2023 | Mask DINO:面向检测和分割的统一Transformer最强框架!
牛津大学CVPR2024 oral | MicKey:特征点检测方法,无需深度测量推断pose!
ICCV 2023 | CVRecon:重新思考神经重建中三维几何特征学习
CVPR 2023:VoxelNeXt:用于3D目标检测和跟踪的全稀疏新框架!
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
BLOS-BEV:BEV感知超200米!nuScenes和Argoverse双SOTA!
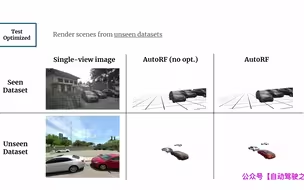
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
多模态3D检测相关2D和3D感知基础知识
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解