V
主页
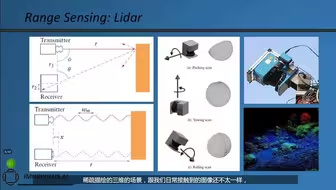
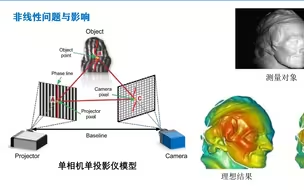
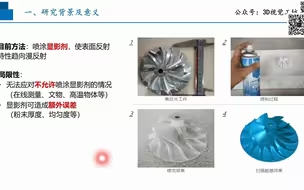
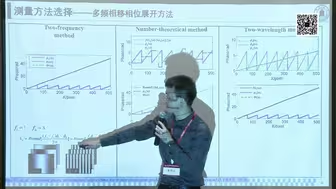
结构光技术简述与高反光技术研究
发布人
主题:结构光技术简述与高反光技术研究 大纲: 1. 结构光技术简述 2. 高反光研究综述 3. 课题组工作介绍 4. 最新研究方向:事件相机+结构光 主讲老师:天涯居士, 结构光课程主讲老师。
打开封面
下载高清视频
观看高清视频
视频下载器
从零搭建一套结构光3D重建系统 [理论+源码+实践]
结构光的非线性问题与校正
高速结构光三维面形测量方法
高反光表面三维视觉测量方法
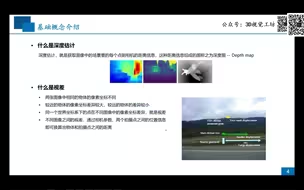
深度相机概述
Transformer模型结构
格雷码辅助实现的三维面形测量:从静态到动态
自动驾驶中的视觉感知技术
ORB-SLAM3基本原理与系统架构
北交博士主讲:深度学习驱动下的相机标定技术发展(上篇)
BEV&Occ提升颗粒度的方案
相机标定的基本原理与经验分享
WACV2023:基于结构光的RGB事件相机(代码开源)
Occupancy的工程细节
无人机-PID算法详解与实战
学习教程:点云匹配-正态分布变换NDT(Normal Distributions Transform)算法
基于事件相机的三维结构光技术ESL,性能好于Realsense技术!
单目深度估计绪论
CVPR2023|基于深度学习MVS的最新进展 GeoMVSNet
BEV与Occupancy网络的全景解析与实战
LVI-SAM|视觉-惯性子系统(VIS)代码精读
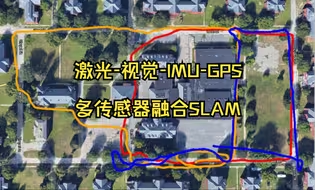
大作业|激光-视觉-IMU-GPS融合SLAM算法
绪论|单目相机标定理论及张正友标定法(上篇)
自动驾驶中的深度学习模型部署实战-数据预处理NPP库介绍及CUDA编程模型之线程操作
[CVPR2022] 使用单幅彩色点投影的深度学习高光谱和深度重建
如何进行三维重建?从单帧深度估计到完整模型重建
PID控制器原理讲解
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
【3D视觉工坊】第七期公开课:图像对齐算法
透彻剖析室内外激光SLAM算法与实战系列课程-室内激光SLAM建图定位实战
多视图几何方式的三维重建
三维点云系列视频——第一章绪论
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
互补滤波姿态估计、卡尔曼滤波姿态、高度估计
公开课|基于PX4的四旋翼建模与控制
四旋翼无人机-TD跟踪微分器原理与仿真
自动驾驶中实战课之Lidar与IMU的同步实战
四旋翼无人机-SO3姿态控制原理
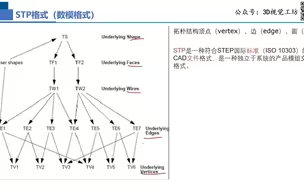
Open3D-三维数据结构