V
主页
京东 11.11 红包
更快更强的3DGS训练方法!慕尼黑工业大学提出3DGS-LM:直接把速度拉满~
发布人
项目主页:https://lukashoel.github.io/3DGS-LM/ 我们提出了3DGS-LM,通过用定制的Levenberg-Marquardt(LM)替换其ADAM优化器来加速3DGS的重建。现有的方法通过减少高斯数或改进可微光栅化器的实现来减少优化时间。然而,他们仍然依赖ADAM优化器在数千次迭代中拟合场景的高斯参数,这可能需要一个小时。为此,我们将优化器更改为与3DGS可微光栅化器结合运行的LM。为了实现高效的GPU并行化,我们提出了一种用于中间梯度的缓存数据结构,使我们能够在自定义CUDA内核中高效计算雅可比向量积。在每次LM迭代中,我们使用这些核从多个图像子集计算更新方向,并将它们组合成加权平均值。总体而言,我们的方法比原始3DGS快30%,同时获得相同的重建质量。我们的优化也与其他加速3DGS的方法无关,因此与普通3DGS相比,可以实现更快的加速。
打开封面
下载高清视频
观看高清视频
视频下载器
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
今天把我做的这个机械臂开源
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
中科大发布“佳佳”机器人
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
【IROS 2022】机器人超硬核点云配准方法:Linewise Non-Rigid Point Cloud Registration
当人工智能有了自我意识.... " "机器纪元 "人性
【ICRA 2023】COVINS-G: 一种协同可视化惯性 SLAM 通用后端
【AI配音】CosyVoice声音克隆首发,一键AI翻唱,无需训练!免费无需联网,在线使用,只需10秒一键偷走你的声音!
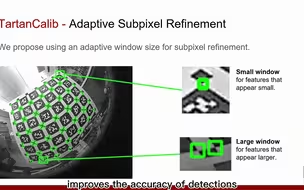
开源广角相机标定!TartanCalib:基于AprilTags自适应亚像素细化的迭代广角镜头标定(卡内基梅隆大学)
速度提高60倍!重建你的自动驾驶场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)
弱侧手训练方法快收藏练起来
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
2024半机械人仿生奥运会冠军团队归来!揭秘比赛与技术细节!
【yolov8】一小时掌握!从0开始搭建部署YOLOv8,环境安装+推理+自定义数据集搭建与训练,入门到精通!
强化学习用于四足机器人的高级技能(站立、俯冲行走)
牛津大学CVPR2024 oral | MicKey:特征点检测方法,无需深度测量推断pose!
登顶Nature!带事件摄像机的低延迟自动驾驶视觉新方案!
【IROS 2022】旅行时间减少47%!FAR Planner:使用动态可见性更新的快速、可尝试的路径规划
野生交易员的野生训练方法——越练越精神
特斯拉的World Model是什么?怎么做端到端训练?
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
透彻!特斯拉occupancy network详解
铅球 | 最佳力量训练方法
太详细了!多传感器融合的策略和方法
南方科技大学发明的类生物四足机器人,够酷!
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
什么是端到端自动驾驶?什么是基础world model?
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
电车巨头爱上造人形机器人,小鹏AI科技日叫板特斯拉
速度和精度双SOTA! TPAMI 2022最新车道线检测算法(Ultra-Fast-Lane-Detection-V2)
速度快!MobileNeRF:移动端实时渲染方案,Nerf导出Mesh
高精地图制作关键技术及领域主流方案分享-part1
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
鱼眼相机和超声波雷达是怎么做融合的?
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
CVPR 2024 | 相机标定算法再升级!基于圆锥曲线的无偏估计~失真也好用!