V
主页
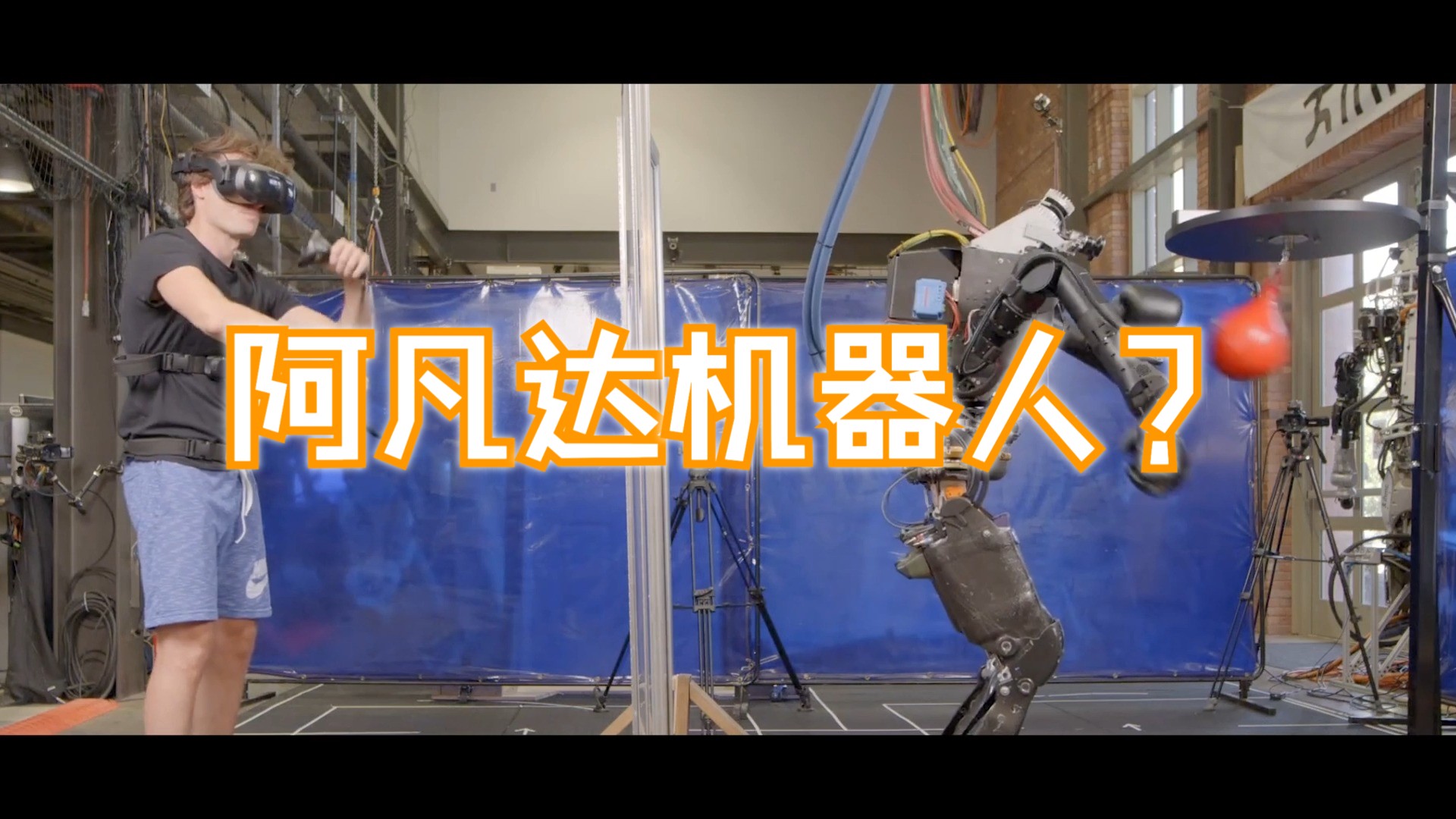
阿凡达机器人!太酷了~
发布人
人形机器人Nadia,它使用简单的VR动作捕捉设置远程控制拳击训练。一位远程用户负责Nadia的动作,展示了我们先进的远程操作系统的强大功能。观看Nadia精确的拳击动作,突出了人形机器人在动态现实任务中的潜力。请继续关注遥操作如何突破机器人控制的界限!
打开封面
下载高清视频
观看高清视频
视频下载器
什么是端到端自动驾驶?什么是基础world model?
仿生机器人女友它水灵灵的来了
自动驾驶中的多传感器融合状态估计如何建模?
亿万富翁私人超级游艇的生产过程
潘多拉星球硝烟再起!《阿凡达 3:火与灰烬》全新预告片,詹姆斯·卡梅隆再度奉献大作
ICRA 2024 | PeLiCal:机器人无目标外参标定新方案!鲁棒性拉满了~
为什么自动驾驶离不开模型部署?
端到端基础!绕不开的感知模块
端到端算法有哪些优势?完爆传统感知规控?
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
小妘的阿凡达日常vlog
大火的BEVFusion算法详解
Nerf+SLAM会擦出什么样的火花?
逆天了!最新波士顿动力机器人高难度动作
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
【IROS2022】加速24%!RobotCore:ROS 2中硬件加速的开放架构
自动驾驶汽车是如何在高精地图中建立精确位置的?
【阿凡达|Neteyam】来不及来不及 你曾笑着哭泣
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
EM Planner is all u need?
分类突破!自动驾驶中的Occupancy感知方法分类
多传感器融合!BEV感知融合算法介绍
阿凡达;军事;枪械
Segment Any Point Cloud:运用视觉基础模型分割一切点云
鱼眼相机和超声波雷达是怎么做融合的?
具身智能Astribot S1?下一代人工智能机器人~AI赋能万物!
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
LiDAR-Camera多传感器融合!StradVision X VUERON Technology
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
韩国小哥翻拍阿凡达2!实景翻拍现场花絮
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
量产基石!MapTR:在线高精地图经典开山之作
透彻!特斯拉occupancy network详解