V
主页
京东 11.11 红包
自动驾驶C++工程师学也不会系列之内存池
发布人
自动驾驶之心惊喜推出的C++实战训练营第二期为大家解决难题🎉🎉🎉 🌟实战驱动的教学方法:训练营课程以实际自动驾驶项目案例为核心,传统/小型/中型/大型项目,循序渐进,活学活用,在实践中学习C++,积累项目经验,理解语言特性和编程技巧! 🌟系统全面的课程设计:从基础语法到高级应用,我们的课程覆盖了C++的各个方面,确保您能够系统地掌握所有关键知识点! 🌟资深行业专家授课:由具有丰富自动驾驶项目经验的资深C++工程师亲自授课,分享他们的实战经验和工作感悟,少走弯路,少踩坑,让您的学习更加贴近实际工作需求! 🌟面向量产的课程内容:我们的课程不仅关注理论学习,更注重实战应用,对Apollo相关模块进行代码详解,帮助您掌握在自动驾驶领域中进行高效C++编程的能力! 🌟更新及时的教学资源:我们使用最新的教材和开发工具,确保您所学的内容与行业发展同步,让您掌握C++的最新特性和最佳实践! 要学习或提升自动驾驶和C++工程能力的小伙伴不要错过这门实战课程,点击直达:https://wrzpl.xetslk.com/s/4rhK75
打开封面
下载高清视频
观看高清视频
视频下载器
基于深度学习的自动驾驶控制模拟(复现钱彬csdn播客)
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
最新!如何使用深度强化学习在未知环境中进行导航?
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
自动驾驶仿真大观:聊聊仿真的研究背景
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
自动驾驶入门技术全栈实战解析-1-感知篇
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
Segment Anything之后,分割的路在何方?
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
渲染速度提高5倍!GaussianOcc:借助3D GS,没有标注也能做Occ(东京大学)
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
南洋理工大学博士分享!规模化可学习与交互式的自动驾驶决策系统如何构建?
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
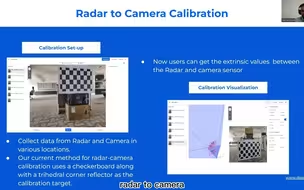
史上最全 | 自动驾驶中的多传感器标定校准(Lidra/Radar/Camera/Stereo/IMU等)
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
特斯拉的World Model是什么?怎么做端到端训练?
CVPR2022 | MeMOT:具有记忆的多目标跟踪
最近有哪些自动驾驶方向的github仓库值得star?
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
自动驾驶规划控制的未来是什么?
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
强化学习用于四足机器人的高级技能(站立、俯冲行走)
ICCV 2023 | Point-SLAM:基于密集神经点云的SLAM!
自动驾驶落地离不开的C++!快来实现第一个自动驾驶模块吧
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
大火的BEVFusion算法详解
Hydra MDP | 英伟达如何理解端到端自动驾驶?
【ICRA 2023】COVINS-G: 一种协同可视化惯性 SLAM 通用后端
牛津大学CVPR2024 oral | MicKey:特征点检测方法,无需深度测量推断pose!
端到端基础!绕不开的感知模块
LMDrive:使用大型语言模型的闭环端到端自动驾驶驾驶