V
主页
3.3 软件编写
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
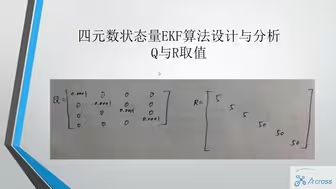
04 飞控算法基础之卡尔曼滤波
08 数据处理-陀螺仪数据
3.2 cubemx配置
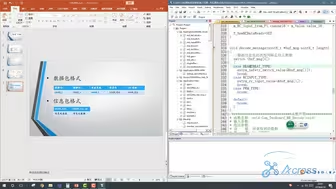
14 双机通信
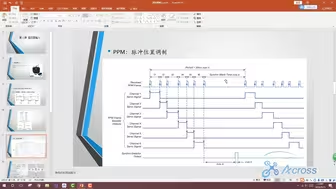
11.1 遥控器协议PPM SBUS简介
3.2 飞控算法基础之PID控制_2
03 飞控算法基础之PID控制
01 开发环境准备
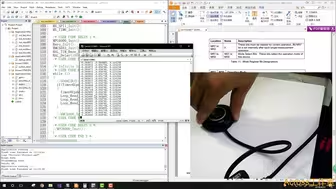
05 MPU6000 IMU传感器数据读取
01 飞控软件概要
19 姿态估计的C代码实现
07 数据预处理-IMU数据滤波_2
8.2 I2C软件模拟编程
12.stm32HAL库使用cubeMX和不使用,以及标准库的区别
飞控教程第16课 pixhawk位置估计互补滤波算法解读
20 控制器的C代码实现
第三课3.1 硬件DIY
18 飞控控制器结构解读
13.2 mavlink代码移植
10.3 GPS读取代码解读
01 漫谈freertos
10 姿态解算_1
8.1 hmc5883介绍
22 地磁校准程序以及flash保存参数功能的C代码实现
02 飞行模式、状态机设计
12 姿态解算_3
7.1 MS5611简介
3.1 硬件DIY
10.1 GNSS介绍
09 数据处理-地磁数据
13 姿态解算_4
10.2 GPS 手册解读及上位机控制方式
06 数据预处理-IMU数据滤波_1
05 姿态解算基础-坐标系 欧拉角 四元数概念
09 ringbuffer环形队列
06 定时器设置
14 姿态解算_5
【中科大RM电控合集】各种底盘各种解算一网打尽
STM32江科大HAL库版----实验室培训
8.3 hmc5883采集