V
主页
京东 11.11 红包
CVPR2022 | 超越COLMAP!面向大规模户外城市环境的辐射场
发布人
视频链接:https://www.youtube.com/watch?v=B973fam8Bag 论文链接:https://arxiv.org/abs/2111.14643 这项工作的目标是从通常用于城市室外环境(例如街景)中世界地图绘制的扫描平台捕获数据中执行3D重建和新视图合成。给定摄像机和扫描器在室外场景中移动时获取的一系列姿势RGB图像和激光雷达扫描,我们生成了一个模型,可以从中提取3D表面,并合成新的RGB图像。我们的方法扩展了神经辐射场,已证明在受控设置中合成小场景的真实新颖图像,并使用新方法利用异步捕获的激光雷达数据,解决捕获图像之间的曝光变化,并利用预测图像分割来监控指向天空的光线密度。这三个扩展中的每一个都在街景数据的实验中提供了显著的性能改进。与传统方法(例如~COLMAP)和最近的神经表示(例如~Mip-NeRF)相比,我们的系统产生最先进的3D表面重建并合成更高质量的新视图。
打开封面
下载高清视频
观看高清视频
视频下载器
为自动驾驶构建城市规模的神经辐射场
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
KITTI SOTA!即插即用,单目3D检测中的单应性损失!(CVPR2022)
速度提高60倍!重建你的自动驾驶场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
终于有人把三维点云与三维重建讲得如此简单了!算法解读、项目实战、论文解读、环境配置
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
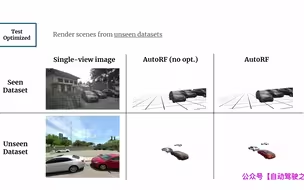
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
多视图三维重建技术发展
太详细了!多传感器融合的策略和方法
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
铰接式车辆的运动规划
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
CVPR 2023 | 通过点云预测作为4D Occupancy 预测的代理
CVPR2022 | NICE-SLAM:神经隐式表示在大型室内场景上的密集重建
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
【ECCV2022】SOTA!MeshLoc:基于网格的视觉定位
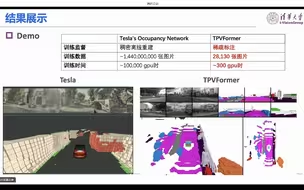
世界模型!特斯拉CVPR2023 Workshop!
CVPR2023 | 利用神经辐射场提升全景三维场景理解的能力
【三维重建】Robust 3D GS:对模糊性进行建模的三维高斯重建方法(未变声版)
[3DGS+RT] Google提出EVER,可替代 3DGS的方法,可对恒定密度椭球进行光线追踪,比 3DGS 的图像质量和灵活性更高,同时保持实时速度
【三维重建】大场景的分层3D GS重建
CVPR2024 | 逆天了!一统所有目标感知任务,目标感知基础模型GLEE
ICCV 2023 | CVRecon:重新思考神经重建中三维几何特征学习
多传感器融合!BEV感知融合算法介绍
最新!如何使用深度强化学习在未知环境中进行导航?
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM
IROS2022 | 我们准备好进行鲁棒且有弹性的SLAM了吗?
LIO-Fusion:通过与GNSS/重新定位和车轮里程计的有效融合增强LIO
RTABMAP算法激光视觉融合SLAM
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)