V
主页
自动驾驶模型鲁棒性如何提升?看完这篇就懂了
发布人
分享人介绍: 刘林,北京交通大学研究生、清华猛狮自动驾驶实习生 分享主要内容: OOD下的自动驾驶模型鲁棒性提升途径 [2401.03907] RoboFusion: Towards Robust Multi-Modal 3D Object Detection via SAM (arxiv.org)
打开封面
下载高清视频
观看高清视频
视频下载器
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
网传极氪车主高速上用自动驾驶,司机和副驾竟盖着被子睡觉,网友炸锅
端到端算法是什么?自动驾驶领域是怎么做的?
世界模型!特斯拉CVPR2023 Workshop!
史上最全!一次性梳理自动驾驶鲁棒性研究
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
Nvidia强大的神经重建引擎:场景重建和事件注入(Neural Reconstruction Engine,NRE)
端到端算法有哪些优势?完爆传统感知规控?
太详细了!多传感器融合的策略和方法
端到端基础!绕不开的感知模块
猴急的爸,等待的妈,碍事的女儿和未出生的他,大型纪录片之《拥挤的家》
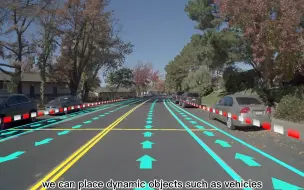
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
国外短短11秒的AI视频,震撼了我3遍...
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
自动驾驶中的激光雷达点云分割-part2
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
轨迹预测到底预测个啥???轨迹预测入门必备!
小姐姐追都追不上!特斯拉这是被理想传染了吗?
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
传感器数据不佳,高清地图构建怎么办?
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
牛津机器人研究所分享最新SLAM算法及其前沿设备
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
一键召唤接我上车,无人代客泊车回头率有点儿高...
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
看到了这个视频,彻底搞懂了PETR算法!
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
Nuscenes、KITTI等多个BEV开源数据集介绍!
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
【CVPR 2024】鉴智机器人算法大佬揭秘3D场景流估计的最新工作——3DSFlabelling
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
面向下一代自动驾驶:全栈里程碑综述汇总
特斯拉的4D自动标注详解!为什么无标注数据work?
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作