V
主页
优化了下传动,使得运行更加流畅,接下来就是移植去年写的运动学动力学算法了
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
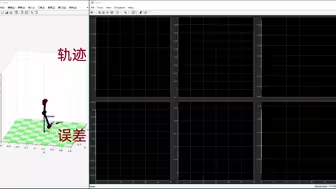
运动学控制结束,就不弄花里胡哨的轨迹了,拉根直线意思意思
外骨骼关节,线传动测试
线控外骨骼,开环力控测试(重力补偿摩擦力补偿丐版)
外骨骼传动单元测试
六维力传感器基础融合功能测试
自制六维力传感器装配后第一次上电测试
第二届群内外骨骼研讨会(1)外骨骼机器人新人入门介绍
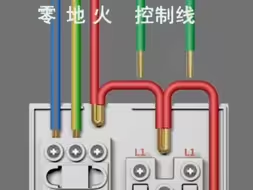
电工接线方法
轻装上阵 —— 无源托臂外骨骼,引领工作新风尚
画了一个连杆,感觉挺适合做外骨骼关节(例如髋关节的内外旋,肘关节屈伸,膝关节屈伸)
外骨骼末端传感器,力的方向和大小,三轴融合输出测试(还需改进)
线驱外骨骼并非没有一席之地(视频为急停和限位装好后的第一次轨迹跟踪测试)
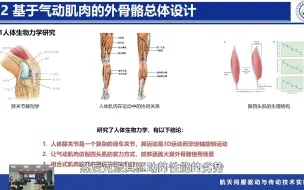
外骨骼线下交流会之基于气动肌肉的坊人廉关节外骨路技术研究
【外骨骼三年计划】大病初愈为了能搬行李箱竟然从零设计制作动力外骨骼!!!
自制外骨骼关节执行器,摆线针轮减速器
外骨骼线下交流会之低成本轻量化外骨骼设计历程分享及优化思路
外骨骼整体做神经网络自适应控制跟踪,收敛效果达到预期(修正了之前的错误)
外骨骼肘关节测试,改进了摆线针减速器
第二届群内外骨骼研讨会(3)一种置于腿后的下肢助力外骨骼
无刷摆线减速器,外骨骼关节开环测试
位置初始化(原谅我关节编码器还没装)肩关节内外旋是另一个电机方案就暂时没搞了
第二届群内外骨骼研讨会(4)控制系统相关简述
动力外骨骼,赋予您前所未有的能量,让您在探索的道路上无界前行,轻松征服一切挑战
第二届群内外骨骼研讨会(5)外骨骼绑缚及曲面建模
有了外骨骼,肯定要出来晒一下~
摆线针减速器,外骨骼关节验证
无刷摆线减速器,机器人单元测试
用于轻量化外骨骼的减速器,通过更换联轴器实现适配市面上大部分电机,整个执行器560g,输出扭矩24nm,一代减速器承重38nm,二代估计50nm这个等我测了再说
能够快装快拆根据使用者体态特征快速定制的外骨骼绑缚,一切为了人机功效
世界上最危险的工具万用表
64通道imu集群,用于外骨骼研发,针对老版本优化了通信协议和pcb,明天就去把上位机改了
蓝箭10km起跳准备中
自适应外骨骼绑缚功能不完整测试,由于零件没到齐,这里只测试一下快拆快装功能(做这玩意儿缝纫机都踩坏了)
8字交叉回路环形导轨系统丨来自HepcoMotion线性传输技术
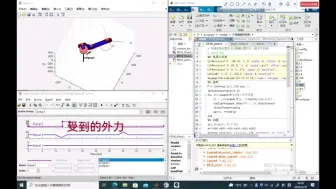
外骨骼阻抗控制,在笛卡尔空间中实现弹性阻尼效果,模拟在运行中受到外力情况下外骨骼的适应能力
【外骨骼机器人】在笛卡尔坐标系画圆(实际上为了水视频)
八局的造价系统比广联达还厉害不服不行
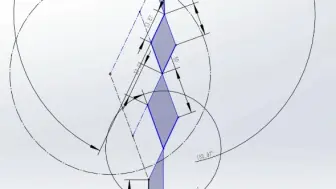
外骨骼膝,肘关节连杆设计
有趣的弹簧压缩工具
新生入学后的第一件事,测试传动单元可行性