V
主页
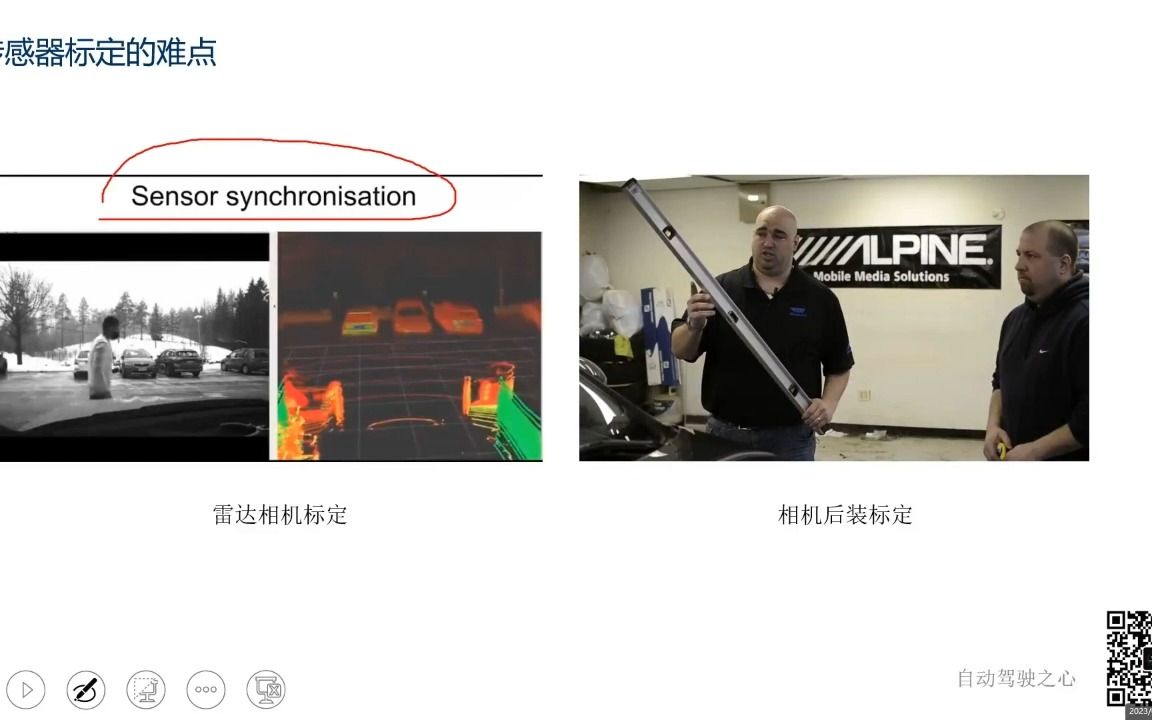
多传感器标定的难点有哪些?
发布人
国内首个多传感器标定系统教程,针对相机内参标定、标定精度优化、传感器到车体标定、Lidar/Radar/IMU/Camera多传感器之间离线标定/在线标定、鱼眼与环视相机标定等20+标定方案展开了详细算法讲解与代码实现,适合感知、标定等算法工程人员从0到1的学习!学习链接:https://gsf.xet.tech/s/dpYnP,小助理微信AIDriver004
打开封面
下载高清视频
观看高清视频
视频下载器
超详细的激光雷达相机标定教程!(Lidar-Camera)
多传感器标定的工具箱有哪些?
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
ICRA2023 | 激光雷达相机内外参联合标定方案!
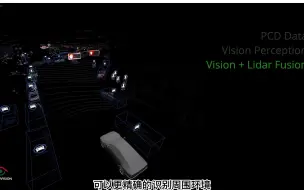
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
太详细了!多传感器融合的策略和方法
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
大火的BEVFusion算法详解
自动驾驶多传感器数据融合(4):多目标跟踪算法
三维空间扫描仪 高效率重建古建筑
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
无人机SLAM入门教程(一):课程概述1.3 传感器简介
使用概率深度补全的3D激光雷达重建(IROS2022)
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
超越Lidar?聊一下4D Radar在自动驾驶中的优势和应用!
端到端算法是什么?自动驾驶领域是怎么做的?
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
什么是端到端自动驾驶?什么是基础world model?
面向下一代自动驾驶:全栈里程碑综述汇总
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
端到端基础!绕不开的感知模块
自动驾驶如何学好C++?
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
ICRA2021 | 多相机激光雷达的外参标定(基于目标姿态估计)
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
LiDAR-Camera多传感器融合!StradVision X VUERON Technology
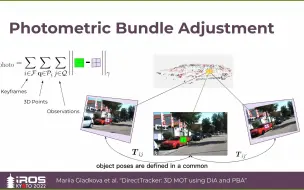
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
温湿度传感器
燃爆了!手工制作最快的自动驾驶小车
CVPR 2024 | 相机标定算法再升级!基于圆锥曲线的无偏估计~失真也好用!
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
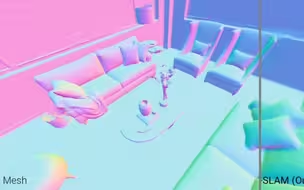
不再依赖RGB-D!NICER-SLAM:一个密集的RGB SLAM系统
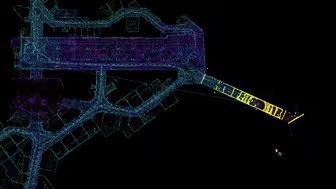
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
端到端算法有哪些优势?完爆传统感知规控?