V
主页
1-6自主移动机器人-移动方式的发展趋势
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
3-2自主移动机器人-轮子的类型
1-9自主移动机器人一般结构
3-3自主移动机器人-轮子的排布
3-25自主移动机器人的可移动度-基于作用分析
1-5移动机器人的分类-轮式履带足式躯干
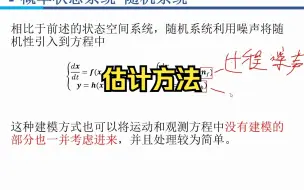
2-3自主移动机器人-预备知识-三维动态系统
3-29移动机器人的完整性
4-35移动机器人平面运动轨迹规划方法-参数优化法
工业机器人组成
3-8自主移动机器人-运动合成作用建模-三轮全向底盘(机器人)
1-7移动机器人的关键性能指标
1-1机器人的基本功能类型
2-4自主移动机器人-预备知识-估计方法
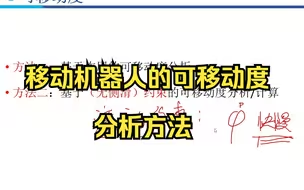
3-24自主移动机器人的可移动度分析方法
3-7自主移动机器人-运动合成作用建模-四轮差动底盘(机器人)的仿真实例vrep.coppeliasim
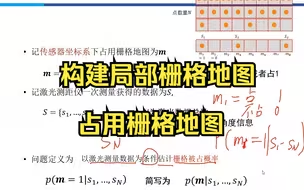
5-9构建局部栅格地图-占用栅格地图
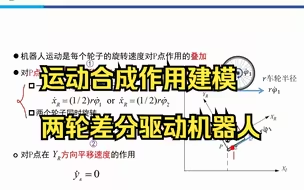
3-5自主移动机器人-运动合成作用建模-两轮差分驱动机器人
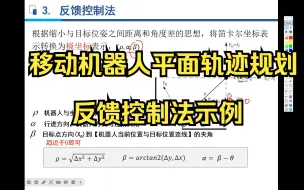
4-37移动机器人平面运动轨迹规划方法-反馈控制法示例1
3-4自主移动机器人-轮式移动机器人运动学建模主要方法及分析假设条件
3-11自主移动机器人-运动合成作用建模-麦克纳姆轮全向底盘(机器人)的仿真实例vrep.coppeliasim
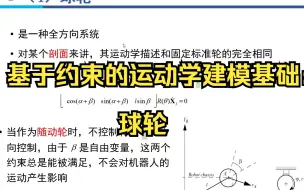
3-18自主移动机器人-基于约束的运动学建模基础:球轮
2-1自主移动机器人-预备知识-序言
3-26自主移动机器人的可移动度-基于约束分析
3-1移动机器人运动学建模-序
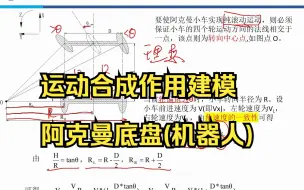
3-12自主移动机器人-运动合成作用建模-阿克曼底盘(机器人)
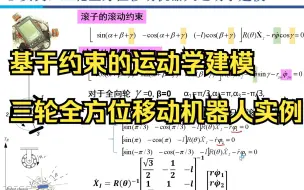
3-22自主移动机器人基于约束的运动学建模-三轮全方位移动机器人实例
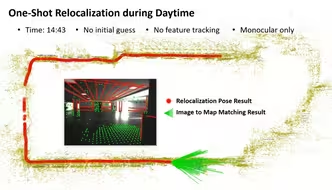
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
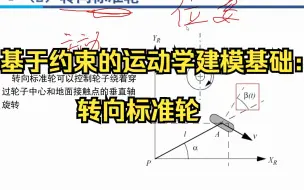
3-15自主移动机器人-基于约束的运动学建模基础:转向标准轮
1-3移动机器人的定义
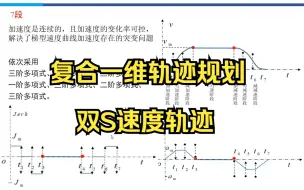
4-30复合一维轨迹规划-双S速度轨迹
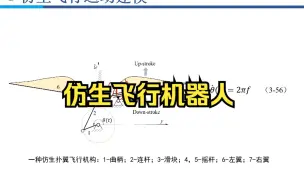
3-32仿生飞行机器人
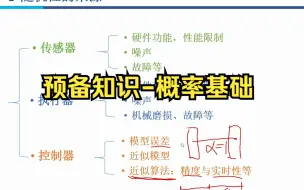
2-2自主移动机器人-预备知识-概率基础
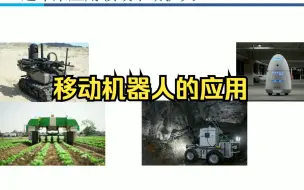
1-4移动机器人的应用
6.工业机器人驱动方式
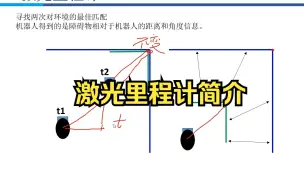
6-6激光里程计简介
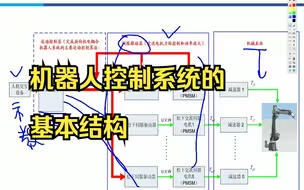
7-2机器人控制系统的基本结构
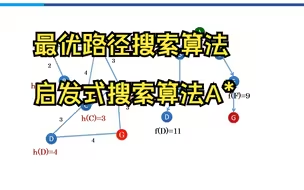
4-16最优路径搜索算法-启发式搜索算法A星
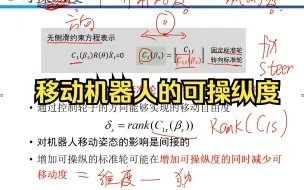
3-27移动机器人的可操纵度
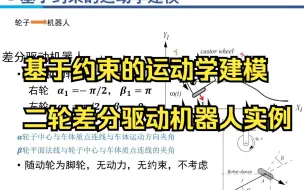
3-21自主移动机器人-基于约束的运动学建模-二轮差分驱动机器人实例
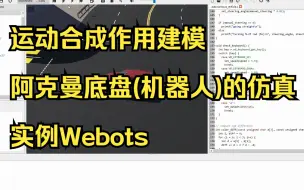
3-13自主移动机器人-运动合成作用建模-阿克曼底盘(机器人)的仿真实例Webots