V
主页
面向三维视觉的C++,包含哪些模块
发布人
课程链接:https://ebzbf.xet.tech/s/2n2k7h 本次课程,我们首先会用几讲的时间带大家过一遍C++的基础知识,然后对三维视觉中常用的几个C++模块进行重点讲解,主要有指针、引用、类和对象、宏和模板、STL编程、栈和队列、智能指针,多线程,CMakeList这几个章节,另外会附上足够多的实践案例,也会在课程中给大家讲解面试技巧和面试题。
打开封面
下载高清视频
观看高清视频
视频下载器
高速结构光三维面形测量方法
国内首个面向具身智能方向的理论与实战系统课程
LVI-SAM|视觉-惯性子系统(VIS)代码精读
大作业|激光-视觉-IMU-GPS融合SLAM算法
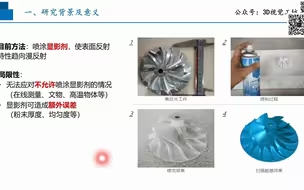
高反光表面三维视觉测量方法
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
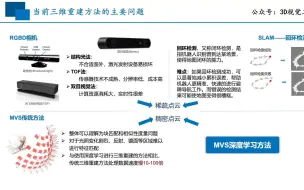
如何进行三维重建?从单帧深度估计到完整模型重建
三维点云系列视频——第一章绪论
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
双目相机标定基础及标定实战
面向大尺度室内场景的主动式重建方法(公开课)
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
三维重建中的网格处理算法分享(公开课)
单目深度估计|连续帧方法实战课
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
Open3D与点云处理简介(公开课)
LVI-SAM代码实战与评估
【3D视觉工坊】第十四期直播 慕尼黑工业大学博士详解室内SLAM中的几何约束
点云3D深度学习模型与实践
多视图几何MVS简介及MVSNet如何高效入门?
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
中科院新作!即插即用的meshing模块!精确构建无动态mesh地图,还能纠正里程计!
无需额外训练!SAMPro3D:零样本3D分割一切!
CVPR2023开源 无纹理和重复纹理也能实现鲁棒的特征匹配!
英伟达-OmniDrive:基于稀疏查询的三维自驾VLM框架
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
ORB-SLAM3基本原理与系统架构
C++|CmakeLists编写规则
惯性导航简介
港科大最新 开放词汇3D物体检测新SOTA-CoDAv2p-下篇
Occupancy占用网络的多维应用探究
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
四元数基础
三维扫描仪技术概览+高亮透明户外扫描挑战
四旋翼无人机-PX4控制算法代码
Occupancy Networks后处理
Occupancy的工程细节
无人机|PID算法详解与实战(上)
OA-SLAM:在视觉SLAM中结合物体语义进行相机重定位[ISMAR 2022]
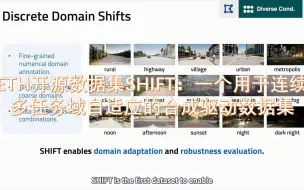
ETH开源数据集SHIFT:一个用于连续多任务域自适应的合成驱动数据集 @3D视觉工坊 #CVPR2022