V
主页
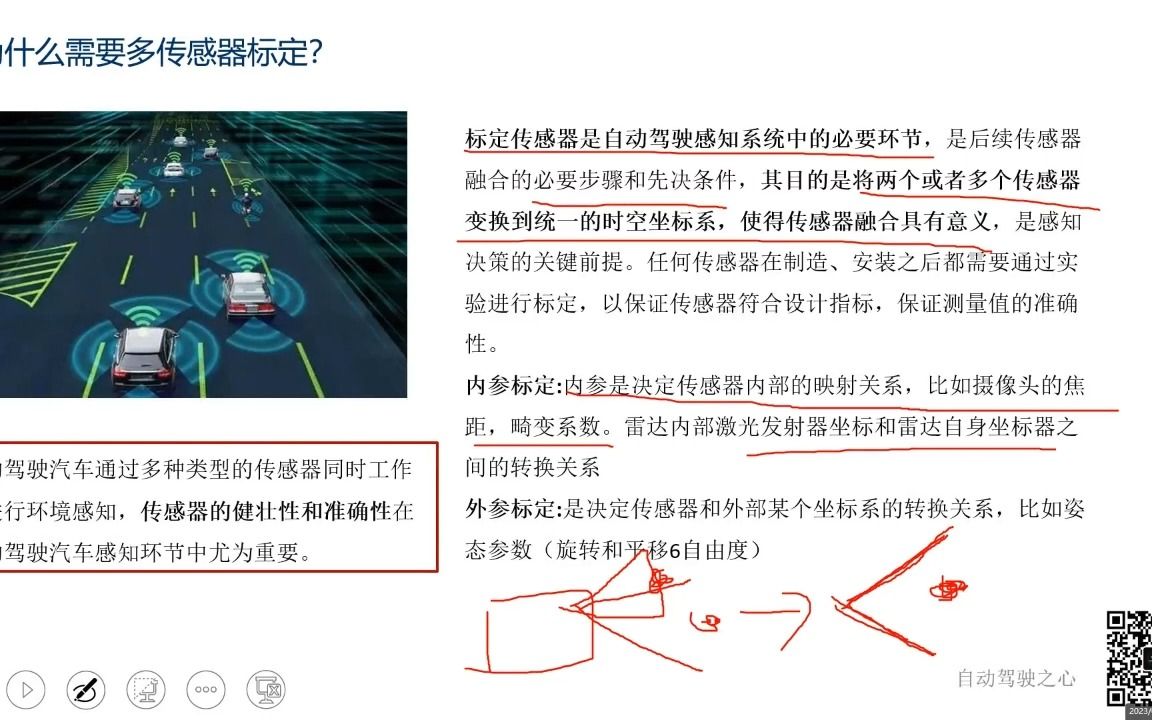
为什么需要多传感器标定?(Lidar/Radar/Camera/IMU/鱼眼相机)
发布人
国内首个多传感器标定系统教程,针对相机内参标定、标定精度优化、传感器到车体标定、Lidar/Radar/IMU/Camera多传感器之间离线标定/在线标定、鱼眼与环视相机标定等20+标定方案展开了详细算法讲解与代码实现,适合感知、标定等算法工程人员从0到1的学习!学习链接:https://gsf.xet.tech/s/dpYnP,小助理微信:AIDriver004
打开封面
下载高清视频
观看高清视频
视频下载器
实战超详细!Radar、Lidar和前置Camera的标定
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
搞懂了!原来激光雷达和相机的内外参是这样标定的
ICRA2023 | 激光雷达相机内外参联合标定方案!
最新!如何使用深度强化学习在未知环境中进行导航?
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
【IROS 2022】多模态SLAM框架MIMOSA:一种针对传感器退化的弹性自治多模态SLAM框架
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
GPS+IMU+3D激光建图
毫米波雷达量产实战!Radar是如何获取点云的?
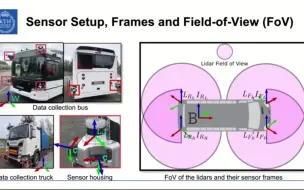
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
太详细了!多传感器融合的策略和方法
8. SLAM系统-上 北邮教授深入浅出三维视觉技术(全网质量最高)
ICRA2021 | 多相机激光雷达的外参标定(基于目标姿态估计)
【自动驾驶实践】多激光雷达实车安装&外参标定&拼接预处理
要啥激光雷达,Factor Perception SDK夜间纯视觉SLAM演示
TBV (Trust But Verify) Radar SLAM:一种用于雷达 SLAM 的方法
自动驾驶多传感器数据融合(3):单目标跟踪算法
不再依赖RGB-D!NICER-SLAM:一个密集的RGB SLAM系统
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
喜报•我方电赛&robocup&江苏省机器人大赛无人机定位精度已达1cm!!!(多日不见,水个视频)
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
【IROS 2022】SOTA!基于粒子滤波的机器人定位和建图(浙大)
什么是端到端自动驾驶?什么是基础world model?
弱光环境下的SLAM系统
【ICRA 2023】COVINS-G: 一种协同可视化惯性 SLAM 通用后端
端到端趋势下,传统规控还有未来么?
视觉3D检测如何做自动标注?
20届智能车双车赛题浅浅完个赛吧!
自动驾驶多传感器数据融合(4):多目标跟踪算法
M-LIO:提升传感器信号丢失容忍度的多激光雷达和多IMU里程计
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)