V
主页
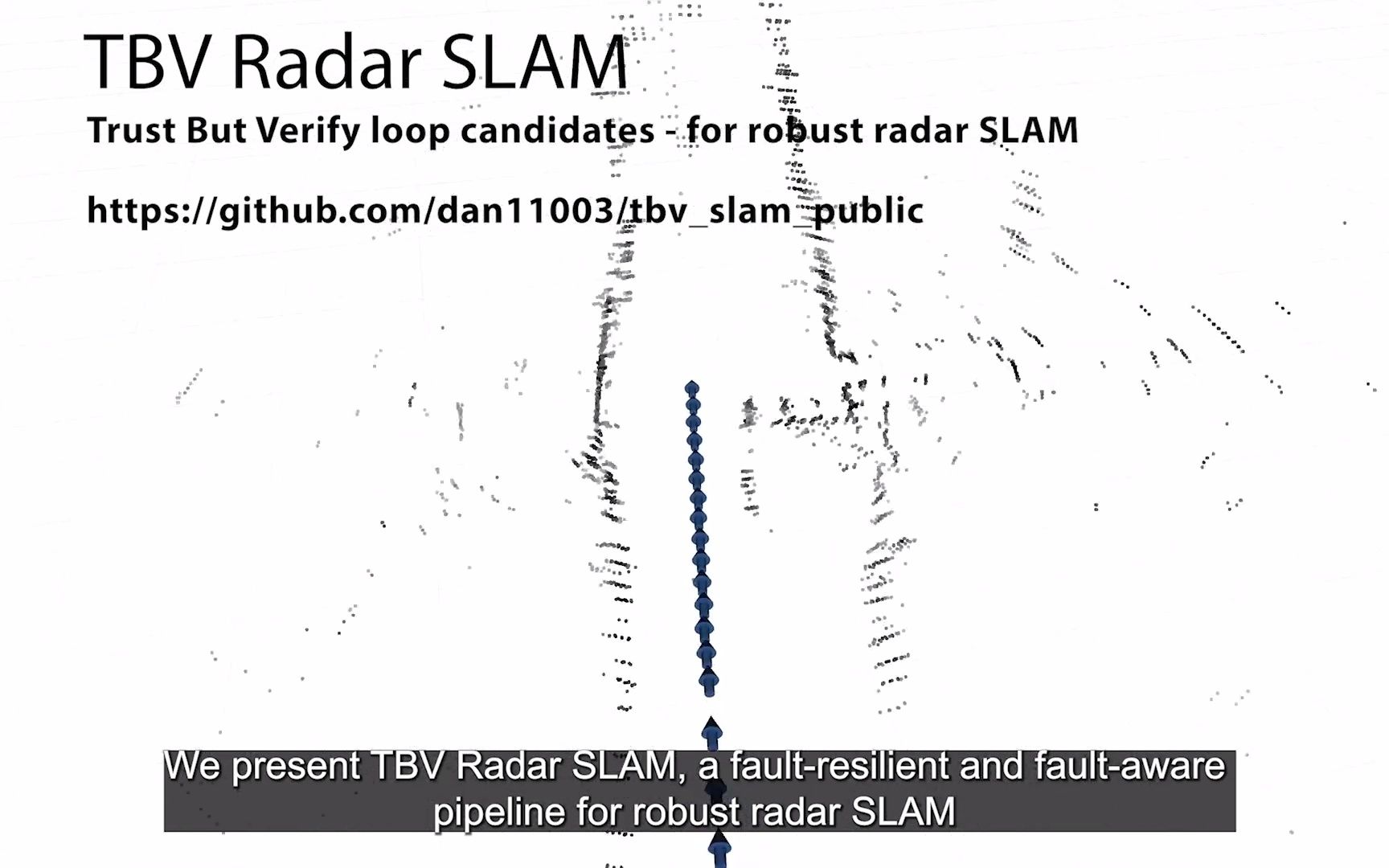
TBV (Trust But Verify) Radar SLAM:一种用于雷达 SLAM 的方法
发布人
论文链接:https://arxiv.org/pdf/2301.04397 大规模环境下的鲁棒 SLAM 要求在多个阶段具有故障恢复能力和感知能力,从感知和里程估计到闭环。在本文中,我们提出了 TBV (Trust But Verify)雷达 SLAM,一种用于雷达 SLAM 的方法,该方法对环路闭合候选值进行了反思性验证。TBV 雷达 SLAM 通过结合多种位置识别技术: 紧耦合的位置相似度和里程不确定性搜索,从原点位移扫描中生成环路描述符,延迟环路选择直到验证完成,实现了较高的正确回路检索率。对虚假约束的鲁棒性是通过从多个循环约束中仔细验证和选择最有可能的约束来实现的。重要的是,验证和选择是在注册之后进行的,这时可以很容易地计算出额外的循环证据来源。我们将我们的循环检索和验证方法与一个位姿图框架内的故障弹性里程测量流水线相结合。通过对公共基准的评估,我们发现 TBV 雷达 SLAM 的误差比以前的技术水平降低了65% 。我们还展示了它在不需要更改任何参数的情况下跨环境进行泛化。
打开封面
下载高清视频
观看高清视频
视频下载器
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
最新!如何使用深度强化学习在未知环境中进行导航?
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
使用概率深度补全的3D激光雷达重建(IROS2022)
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
用于激光雷达视图合成和三维重建的瞬态神经辐射场
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
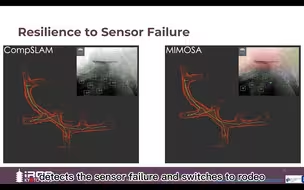
【IROS 2022】多模态SLAM框架MIMOSA:一种针对传感器退化的弹性自治多模态SLAM框架
SLAM扫描设备现状
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
不再依赖RGB-D!NICER-SLAM:一个密集的RGB SLAM系统
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第3节:车路协同场景激光雷达部署策略优化方法
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限(上篇)
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
多传感器融合!BEV感知融合算法介绍
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
ICCV 2023 | Point-SLAM:基于密集神经点云的SLAM!
实战超详细!Radar、Lidar和前置Camera的标定
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
Segment Anything之后,分割的路在何方?
多传感器标定的工具箱有哪些?
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
相机和激光雷达融合的多车辆跟踪demo
ICRA2023 | 激光雷达相机内外参联合标定方案!