V
主页
Boston Dynamics Stretch at MODEX 2024
发布人
https://www.youtube.com/watch?v=rCZHlfS_pdM We're demonstrating Stretch, our mobile case handling robot, unloading containers autonomously at #Modex 2024, and previewing the robot's future mobile palletizing applications. Learn about new features we've released for Stretch, and where the robot is headed next. To learn more about Stretch, visit: https://bosdyn.co/stretch
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器人足底机械结构设计
有开源github代码! RA-L论文 人形机器人的多接触全身控制
通过优化理论指导设计双足以达到控制和任务的最优
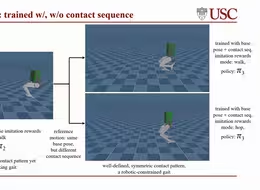
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
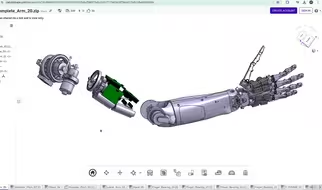
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
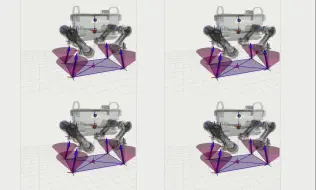
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
双足机器人步态生成 MATLAB and Simulink
基于分层优化的四足机器人全身运动控制搬运重物
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
Highly dynamic gaits controlled by a whole-body MPC
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
人形机器人灵巧手臂最新成果
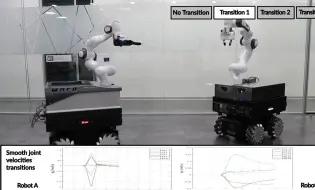
A Distributed Processing Approach for Smooth Task Transitioning in SHC
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
How to design nonlinear MPC with deep learning prediction model
通过对抗运动先验学习四足机器人的双足行走
Reinforcement learning for blind stair climbing with legged and wheeled robot
真牛!这个人形机器人吊打很多厂家的“产品”
Deep Compliant Control for Legged Robots
Learning whole-body manipulation for quadrupedal robot
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
Control is dead ?control+ learning才是未来
(ICRA 2024)Contrastive Initial State Buffer for Reinforcement Learning
MIT Robotics - Marco Hutter - Robots in the wild
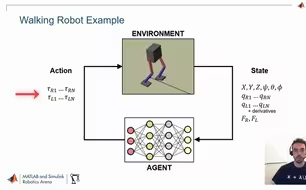
双足机器人的深度强化学习- MATLAB and Simulink
Humanoid robot research result highlights in 2021
(ICRA 2024) Actor-Critic Model Predictive Control
(Talk ICRA 2024) Actor-Critic Model Predictive Control
Safety-Critical Control of Autonomous Systems -Aaron Ames
ANYmal在金属、采矿厂进行机器人自主巡检
(Humanoids 22)半人马机器人爬上 0.3 m 的平台,手臂上承载 17 kg 的有效负载
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
Online trajectory optimization for dynamic aerial motions of a quadruped robot
四足机器人控制器分享(webots+matlab)
这下真狗了 Boston Dynamics