V
主页
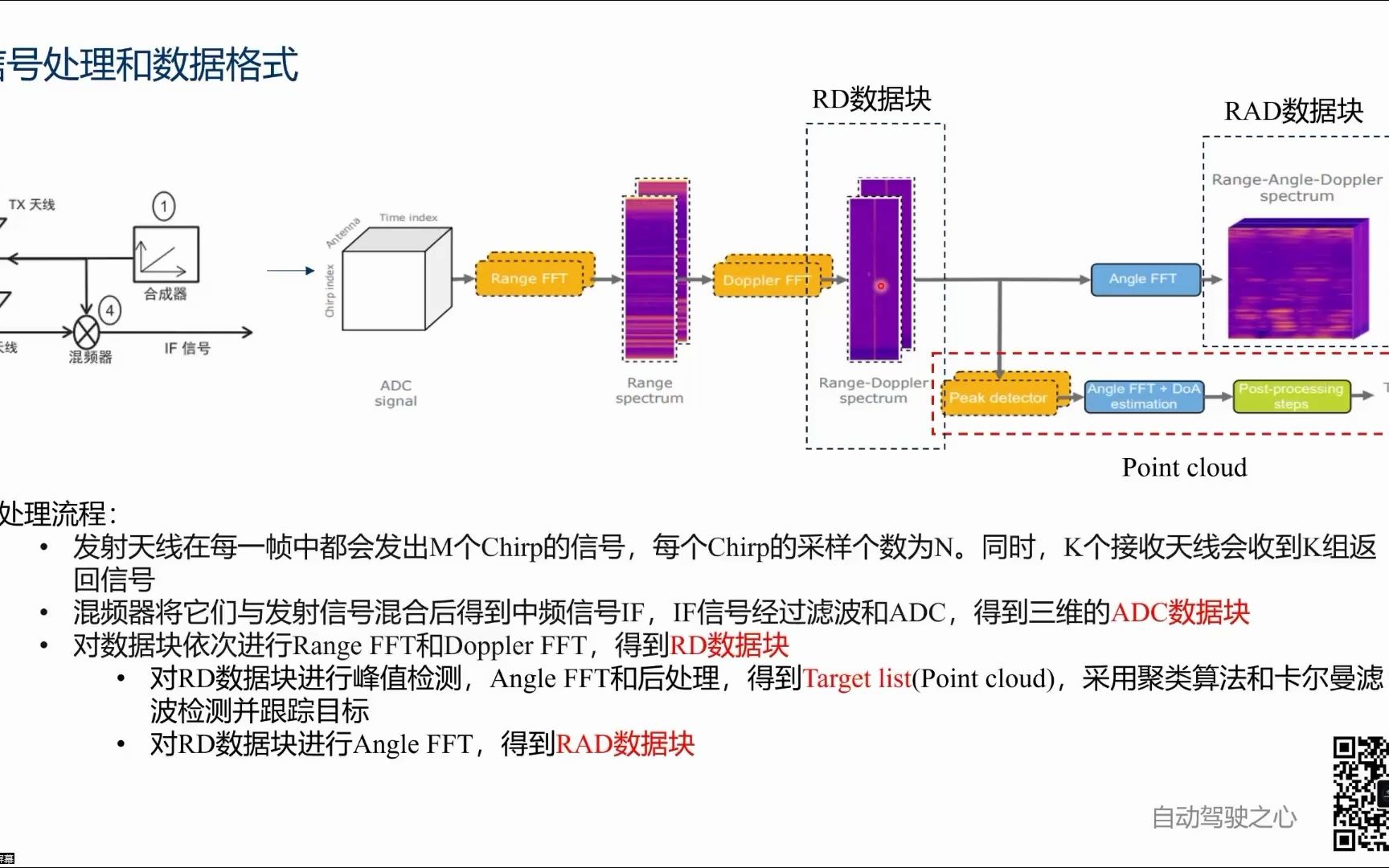
毫米波雷达视觉融合教程:毫米波雷达信号处理与数据格式
发布人
毫米波雷达视觉融合教程:雷达信号处理与数据格式 0. 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) 1. 历时半年整理,多传感器融合系列:毫米波雷达和视觉融合感知教程正式上线了!!!传统方式&&深度学习方案,从数据处理、聚类、跟踪匹配、深度学习点云方案、2D/3D融合等多个方向展开讲解,是一门同时面向工业界和学术界的教程! 课程链接:https://gsf.xet.tech/s/NKFsd 小助理微信咨询:AIDriver004
打开封面
下载高清视频
观看高清视频
视频下载器
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
超详细的激光雷达相机标定教程!(Lidar-Camera)
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
毫米波雷达量产实战!Radar是如何获取点云的?
太详细了!多传感器融合的策略和方法
特斯拉的4D自动标注详解!为什么无标注数据work?
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
使用概率深度补全的3D激光雷达重建(IROS2022)
抢先体验,国产骄傲,毫米波雷达模块免费申请,人体微动存在检测,活动名额多,通过率高!
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
端到端数据格式是什么样的?快来看看吧
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
端到端算法是什么?自动驾驶领域是怎么做的?
鱼眼相机和超声波雷达是怎么做融合的?
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
在线高精地图与城市NOA是什么关系?为什么如此重要?
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
LiDAR-Camera多传感器融合!StradVision X VUERON Technology
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
Nuscenes、KITTI等多个BEV开源数据集介绍!
SemanticKITTI SOTA!激光雷达数据中的运动目标分割(IROS2022)
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
详解!基于Camera和基于激光雷达的自动驾驶系统区别!
多传感器标定的工具箱有哪些?
数据为王!车道线数据高效生成策略有哪些?
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
端到端自动驾驶:SparseDrive 算法详解
IROS2022最新思路 | RCA:自监督学习实现视觉导航(具有驾驶舒适性)
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
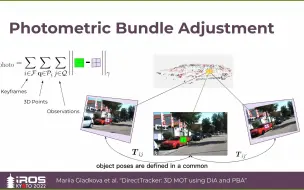
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
最新!全路段体验特斯拉自动驾驶功能