V
主页
超详细!激光雷达和IMU的无目标外参标定
发布人
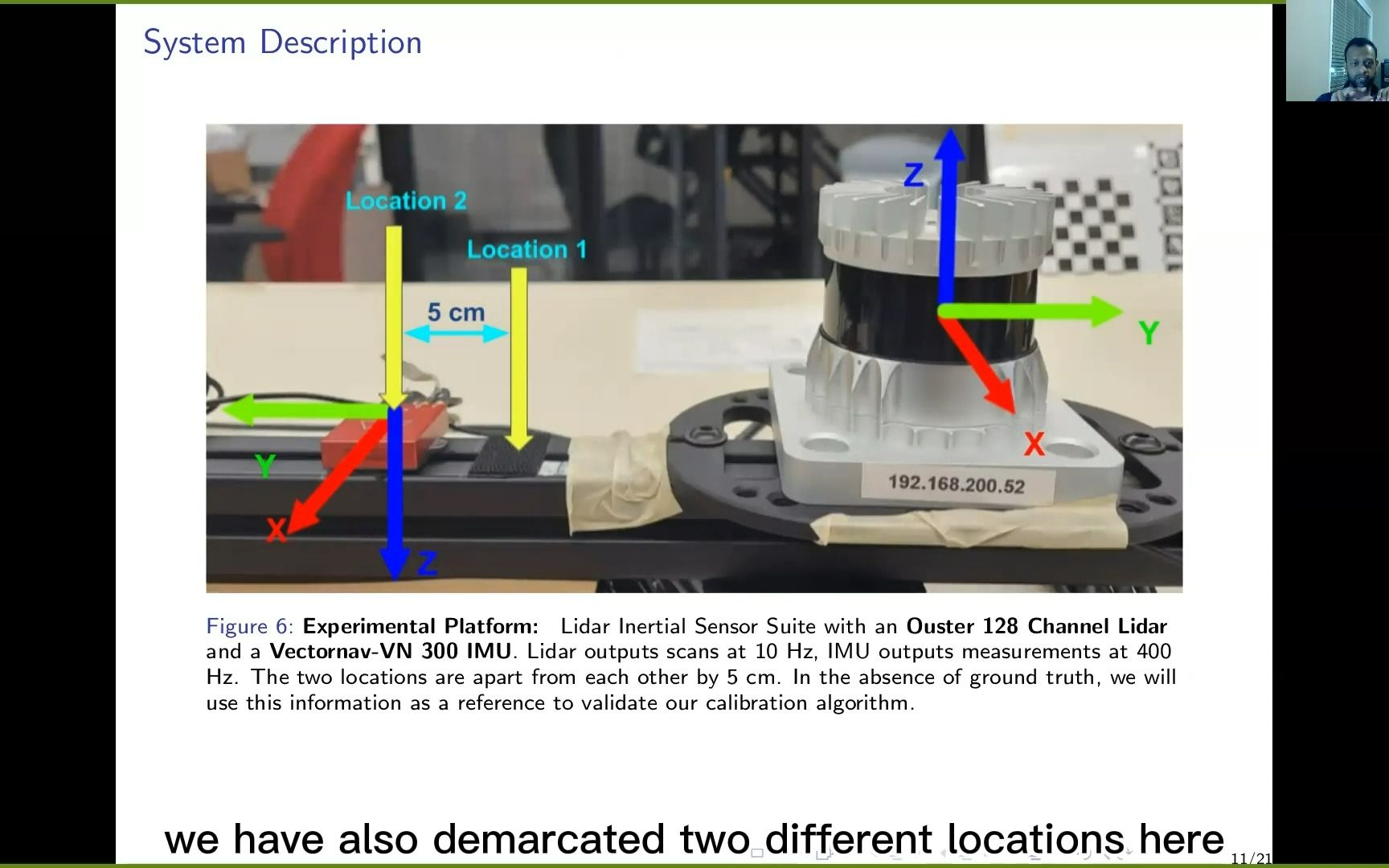
论文名称:Target-free Extrinsic Calibration of a 3D-Lidar and an IMU 论文链接:https://arxiv.org/abs/2104.12280 视频链接:https://www.youtube.com/watch?v=VIc8XxNrymQ 这项工作为3D激光雷达和IMU对提出了一种新的无目标外部校准算法,该算法使用扩展卡尔曼滤波器(EKF),利用基于运动的校准约束进行状态更新。这些步骤包括,通过激光雷达惯性传感器套件沿所有自由度的运动激励进行数据收集,通过在最小二乘优化框架中使用上述基于运动的校准约束的旋转分量确定传感器间旋转,最后,在扩展卡尔曼滤波器(EKF)框架中,使用基于运动的校准约束进行状态更新来确定传感器间平移。
打开封面
下载高清视频
观看高清视频
视频下载器
超详细的激光雷达相机标定教程!(Lidar-Camera)
实战超详细!Radar、Lidar和前置Camera的标定
ICRA2023 | 激光雷达相机内外参联合标定方案!
使用YOLOv4完成激光雷达点云下的3D目标检测!
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
M-LIO:提升传感器信号丢失容忍度的多激光雷达和多IMU里程计
【自动驾驶实践】多激光雷达实车安装&外参标定&拼接预处理
使用概率深度补全的3D激光雷达重建(IROS2022)
量产经验分享:如何提升相机标定的精度?
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
SemanticKITTI SOTA!激光雷达数据中的运动目标分割(IROS2022)
无监督域适应3D检测SOTA!让激光雷达奔跑起来~
83FPS,史上最快 | IA-SSD: 基于point方式的高效激光雷达点云3D目标检测网络(CVPR2022)
支持在线时空标定!高效多传感器辅助惯性导航系统(ICRA2021)
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
【WACV 2022】基于Radar-Camera融合的2D目标检测融合点云剪枝
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
自动驾驶多传感器数据融合(1):什么是多传感器融合?
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
特斯拉的4D自动标注详解!为什么无标注数据work?
一文尽览:自动驾驶大语言模型应用综述分享
关于自动驾驶的一切(层级划分/Lidar/Radar/视觉感知/AI与发展等)
透彻!特斯拉occupancy network详解
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
带激光雷达了!体验DJI Air 3S
纯视觉VS激光雷达,到底谁更好?
硬核拆解+数模渲染,带你认识激光雷达界的销冠——速腾聚创 M1P
NeRF-RPN:第一个有效的基于NeRF的目标检测框架
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
相机和激光雷达融合的多车辆跟踪demo
自动驾驶如何学好C++?
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
RangeDet:基于Range-View的激光雷达3D目标检测网络(ICCV2021)
端到端基础!绕不开的感知模块
端到端算法是什么?自动驾驶领域是怎么做的?