V
主页
京东 11.11 红包
为什么说扩散模型比自回归更强?
发布人
你有没有想过生成型人工智能实际上是如何工作的?简而言之,与常规人工智能完全相同! 在这段视频中,我分析了生成式人工智能的最新技术——自动回归器和去噪扩散模型——并解释了这项看似神奇的技术是如何像机器学习的其他部分一样,都是曲线拟合的结果。 来学习自回归和扩散之间的差异(和相似之处!),为什么需要这些方法来生成复杂的自然数据,以及为什么扩散模型更适合图像生成,但不用于文本生成。
打开封面
下载高清视频
观看高清视频
视频下载器
马斯克,中国窃取美国用户数据? 没人关心你看什么片……
李开复透露「GPT5训练遇到困难,O1模型被迫放出来」OpenAI还有很多私货没有发布
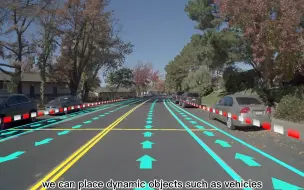
特斯拉的World Model是什么?怎么做端到端训练?
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
一文尽览:自动驾驶大语言模型应用综述分享
特斯拉的4D自动标注详解!为什么无标注数据work?
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
Nvidia强大的神经重建引擎:场景重建和事件注入(Neural Reconstruction Engine,NRE)
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
几可乱真!面向真实场景的世界模型居然被用得这么六!
太详细了!多传感器融合的策略和方法
端到端自动驾驶:SparseDrive 算法详解
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
Hydra MDP | 英伟达如何理解端到端自动驾驶?
70年老算法Dijkstra被证明普遍最优 斩获顶会FOCS 2024最佳论文
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
轨迹预测到底预测个啥???轨迹预测入门必备!
认识一下新同学——超级小爱
端到端基础!绕不开的感知模块
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
从0到1!彻底搞懂BEVFormer算法原理
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
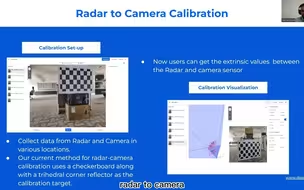
史上最全 | 自动驾驶中的多传感器标定校准(Lidra/Radar/Camera/Stereo/IMU等)
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
2024终于有科研大佬把“你的科研能力从什么时候开始突飞猛进的?”讲清楚啦!
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
自动驾驶安全的关键!| 轨迹预测中的经典模型大盘点
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
ParkingE2E:纯视觉端到端泊车网络(秦通团队出品)
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
LMDrive:使用大型语言模型的闭环端到端自动驾驶驾驶
端到端算法是什么?自动驾驶领域是怎么做的?
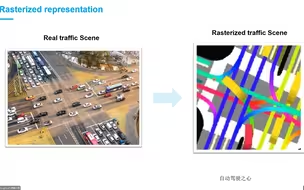
渲染速度提高5倍!GaussianOcc:借助3D GS,没有标注也能做Occ(东京大学)
自动驾驶中的多传感器融合状态估计如何建模?
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
最近有哪些自动驾驶方向的github仓库值得star?